 Hacker House
Hacker HouseHere's the 2nd video for our robotic bartender project.
In this part we deconstructed the old bartender to reuse some parts for our new project. We also spent some time building the rotating platform. This will be used to move the drink glasses whilst the barbot is operating.
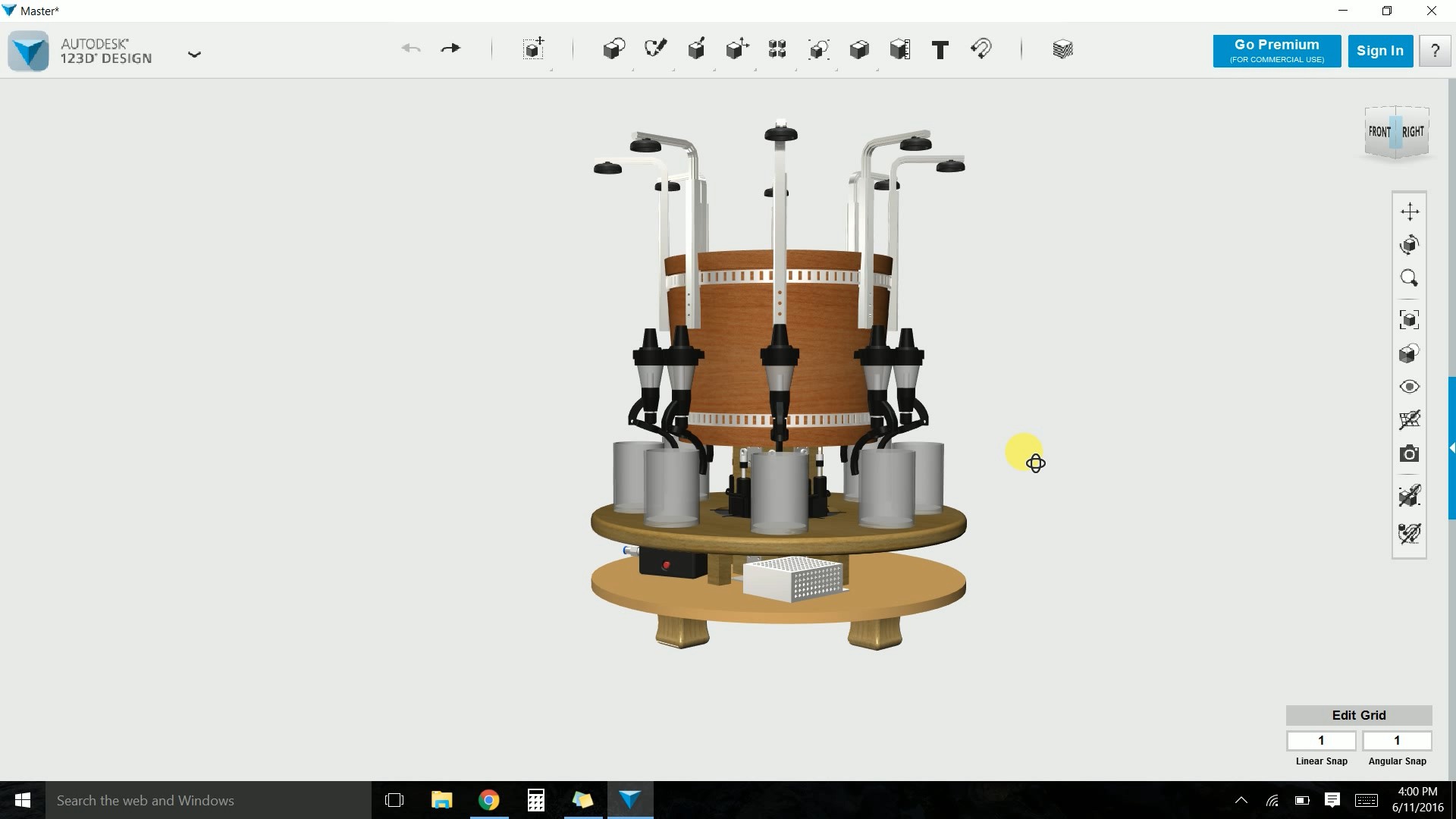
We also built a 'CAD' model to visualize, manipulate, and verify our design. We decided that the actuators will be positioned on the main center post. The dispenser levers will be inverted so that our actuator arm will have a track to slide in. In order to verify that this will work, we built a test stand and used a power supply to actuate the arm.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.