 Peter McCloud
Peter McCloudThis last week I received the rest of the major electronics needed to complete the project. Shown below is the FrSky Taranis Trasnmitter, FrSky Delta 8 Reciever, Pixhawk Flight Controller, GPS Module and a Raspberry Pi.
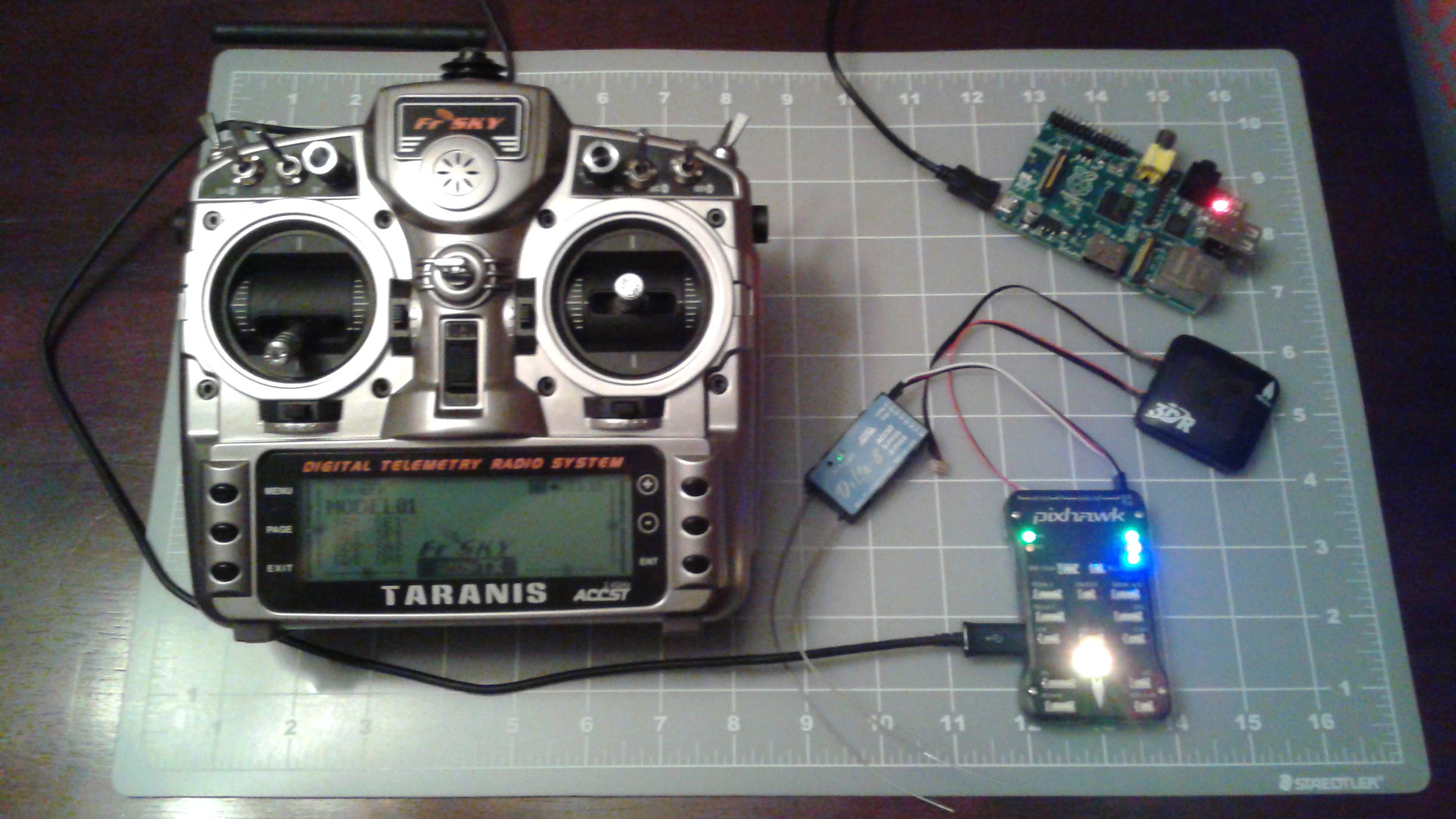
There is a good overview on Pixhawk compatible RC Receivers already on the ardupilot wiki. In summary the pixhawk can save space by using a single PPM input instead of 8 PWM inputs. Any RC Receiver with PWM output could be used, but an encoder would have to be used. The wiki page highly recommended the FrSky Delta 8 since it can output the PPM signal. The Delta 8 is designed to connect to a number of receivers. The FrSky Taranis transmitter was also compatible with the Delta 8 and recommended again by the ardupilot wiki. It'd be nice to have the OSRC, I hope that it's able to get funding to finish development.
Now that I've got these items in hand I can start on getting the Pixhawk and Raspberry Pi to talk to each other using Mavlink. Luckily this has been documented on the ardupilot wiki as well. Also thanks to my friend Drew for offering his unused Raspberry Pi for the project!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Peter, I noticed in your diagram of the props and prop rotation that the CW are on one side and CCW rotating props are on the other side.
Every electric quad I've seen has the CW props at opposite ends of one arm and the CCW at opposite ends of the other. Is that because of the torque of the electric motor at each arm? (New to all of this. Just trying to figure it out :-) )
Are you sure? yes | no
Don, great question. You're correct, all of the other quads are laid out the way you described. That layout allows for yaw and roll to be uncoupled.
When I first designed Goliath, I was planning to use vanes and the configuration of CCW & CW rotors didn't matter for control in that manner. The side to side config really helps for the pulley layout. However the vanes don't provide for enough control and I switched to variable pitch. Once I get the variable pitch rotors tested, I need to reconfigure the belt system.
Are you sure? yes | no
I was curious because I'm not a mechanical engineer and I found out that things do some funny things I don't always anticipate or understand. Like the gold dredge I built with a 5 hp pump on it. Threw the input hose in the water and cranked it up. Darned thing almost sank before I could get it shut off. Asked on the net what was wrong and someone said TURN THE PUMP AROUND. I did. It's fine now. :-)) I'm working on a small gas quad now. Started thinking about it when there was only one gas that was flying. (only want a 5-10 pound payload.) Finally started to work on it. VP props and stealing some of your ideas LOL. You have taken on one heck of a project. I'll keep checking on you to see your progress. Anxious to see this monster of yours flying.
Are you sure? yes | no
Are you sure? yes | no
Are you sure? yes | no