 Peter McCloud
Peter McCloudThe flight controller chosen for Goliath is the Pixhawk, running the PX4 flight stack. Up until now, integrating the flight controller hasn't been a priority. The design of the drive train is on-going, and there was the risk that the controller could be damaged or destroyed during testing.
With 40 tests now complete and the risk of losing the controller reduced, it was time to put the controller on-board Goliath for future testing. The controller won't actually be doing anything initially. The idea is to just make sure the controller can reliably operate while Goliath is running. Once it's proven it can operate, the next step will be to control the throttle and choke servos and eventually the ignition and starter relays.
The first step to get the Pixhawk on-board was to add the power module. On an electric quad copter, the power module goes in-between the battery and the ESC. The module is the primary source of power for the controller and also has a current sensing capability. Below is a picture of the power module from the Ardupilot documentation.
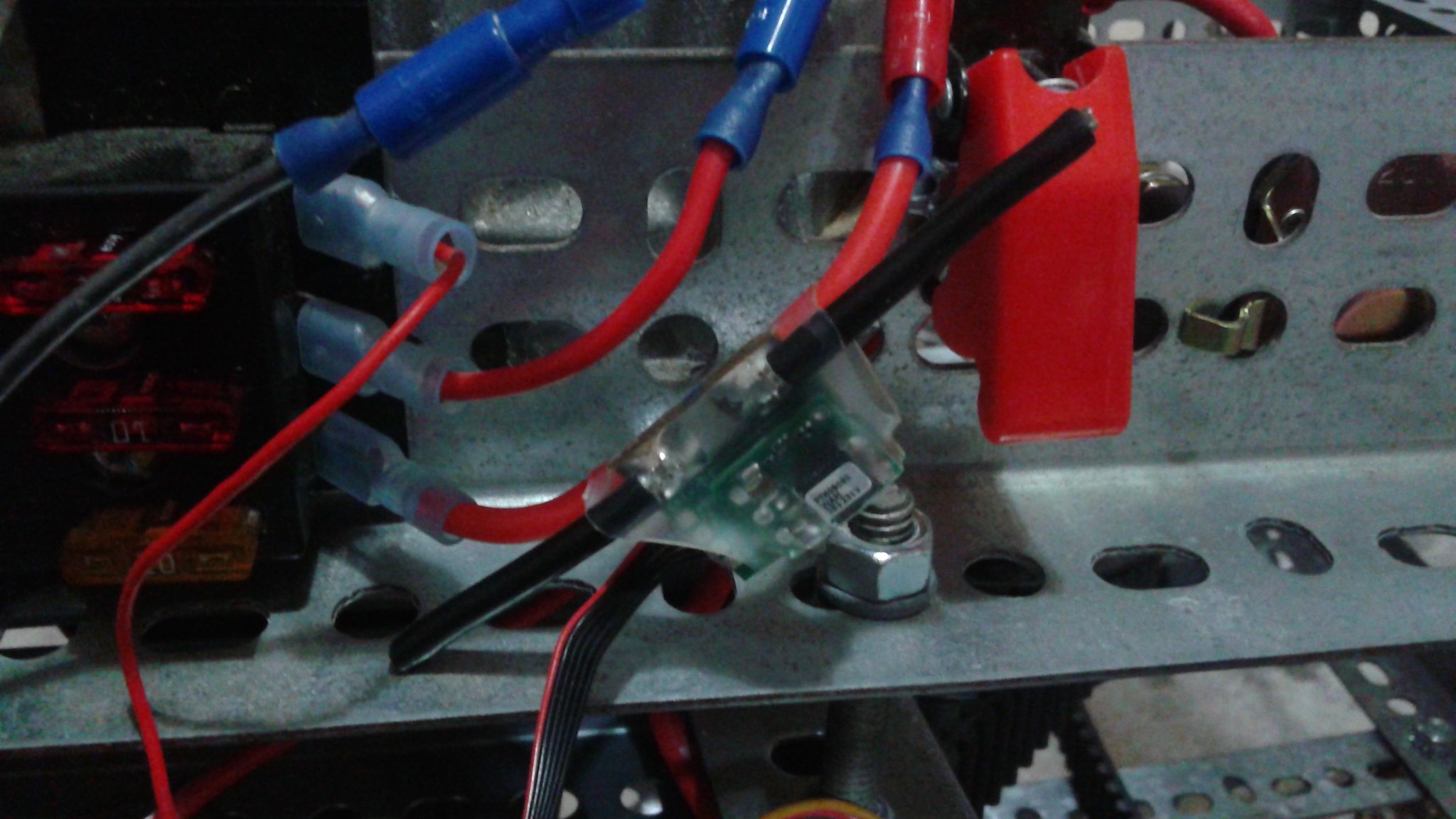
 On Goliath, the power module was placed between the alternator and the battery to measure the current being supplied by the alternator. The frame on Goliath acts as the ground path, so the XT60 connectors were cut off and the module was connected using the existing bullet connectors. Here's a photo of the power module mounted on Goliath (not yet grounded).
On Goliath, the power module was placed between the alternator and the battery to measure the current being supplied by the alternator. The frame on Goliath acts as the ground path, so the XT60 connectors were cut off and the module was connected using the existing bullet connectors. Here's a photo of the power module mounted on Goliath (not yet grounded).
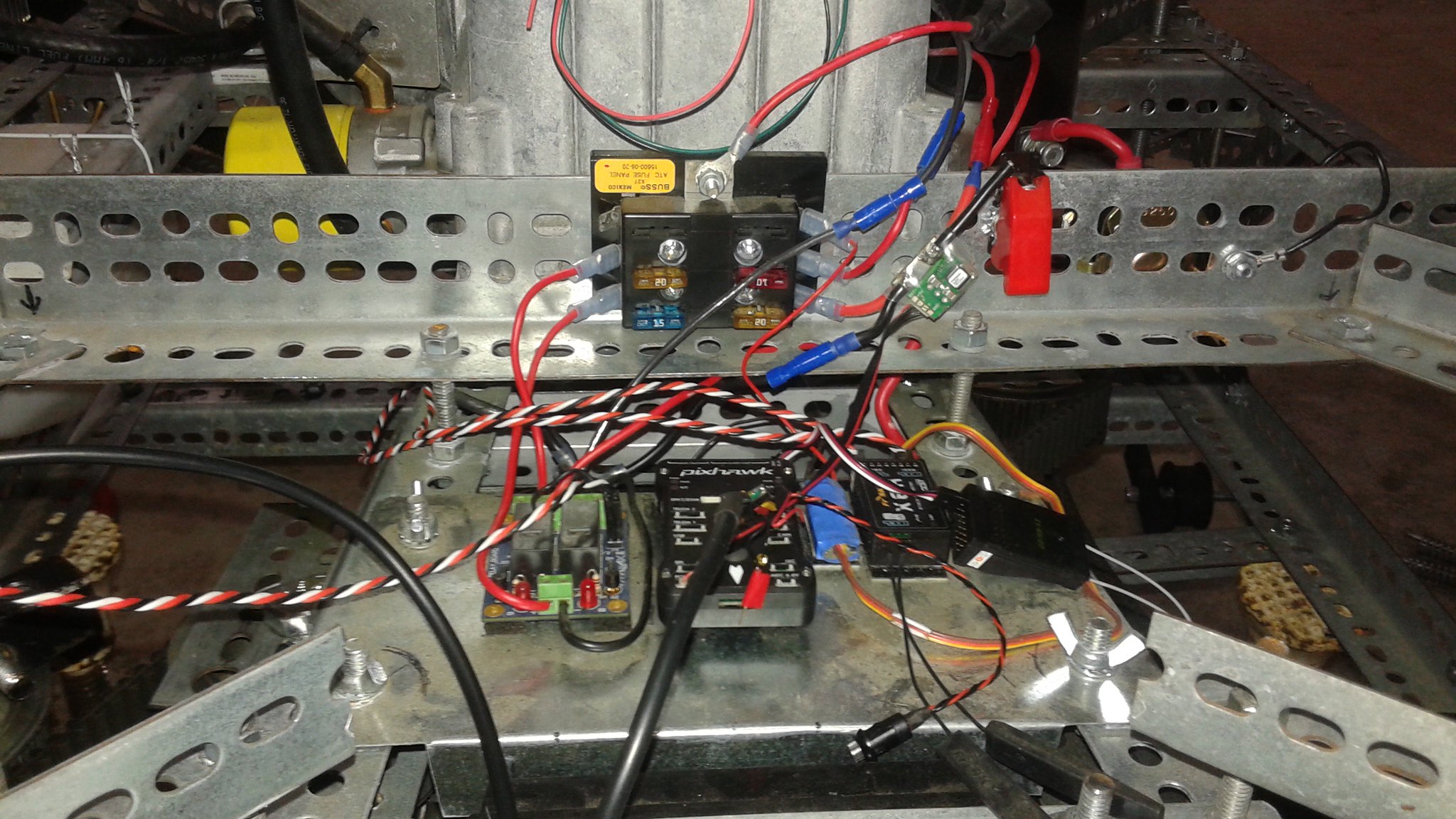
 The next step was placing the Pixhawk with the Delta 8 receiver and the safety switch on to the vehicle. The Pixhawk powers up when the master switch is turned on. The safety switch then has to be be triggered before the Pixhawk can be armed. Below is all of the hardware in place, but unsecured.
The next step was placing the Pixhawk with the Delta 8 receiver and the safety switch on to the vehicle. The Pixhawk powers up when the master switch is turned on. The safety switch then has to be be triggered before the Pixhawk can be armed. Below is all of the hardware in place, but unsecured.
 The Pixhawk was successfully armed today and is properly logging the data and providing pre and post-flight summaries. The next step for the controller is to secure the hardware to get it ready for the next test.
The Pixhawk was successfully armed today and is properly logging the data and providing pre and post-flight summaries. The next step for the controller is to secure the hardware to get it ready for the next test.
Additionally, work on the custom mixers and config file for Goliath has been started. The files can be found in the github repository at:
https://github.com/mccloudaero/goliath-quadcopter/tree/master/avionics
As for the next test, it shouldn't be too far off. All of the new axles and pulleys are complete and are just waiting on the new mounts to be finished before they can be placed on the vehicle. The new rotor has been epoxied and came out the vacuum bag in good shape. It'll be ready after a few rounds of sanding and primer.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.