 Luke
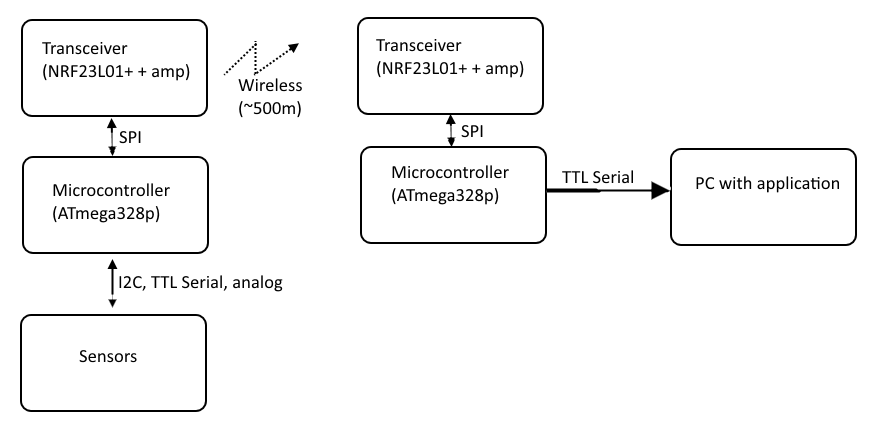
LukeSystem overview:
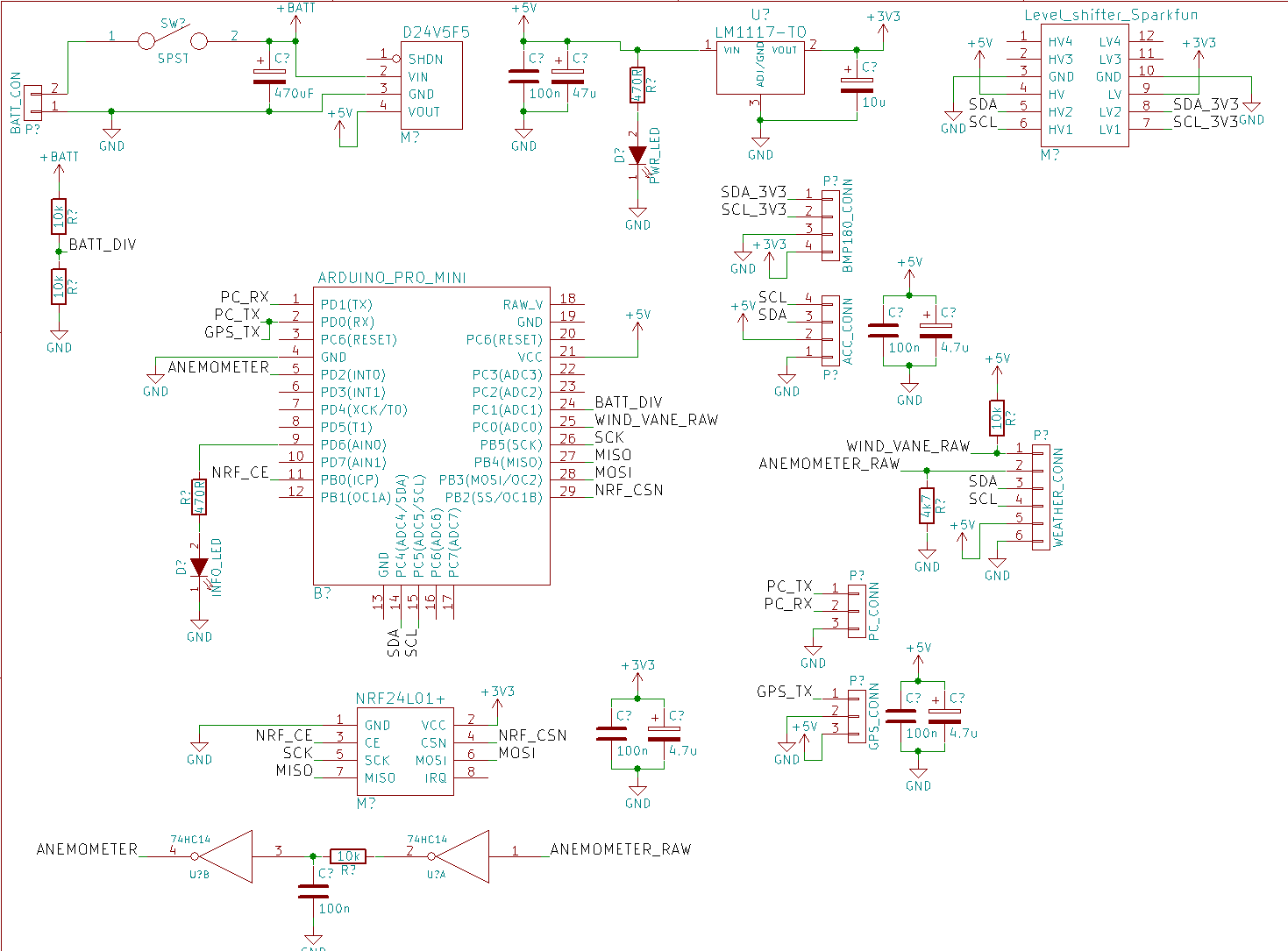
 Full transmitter schematic:
Full transmitter schematic:
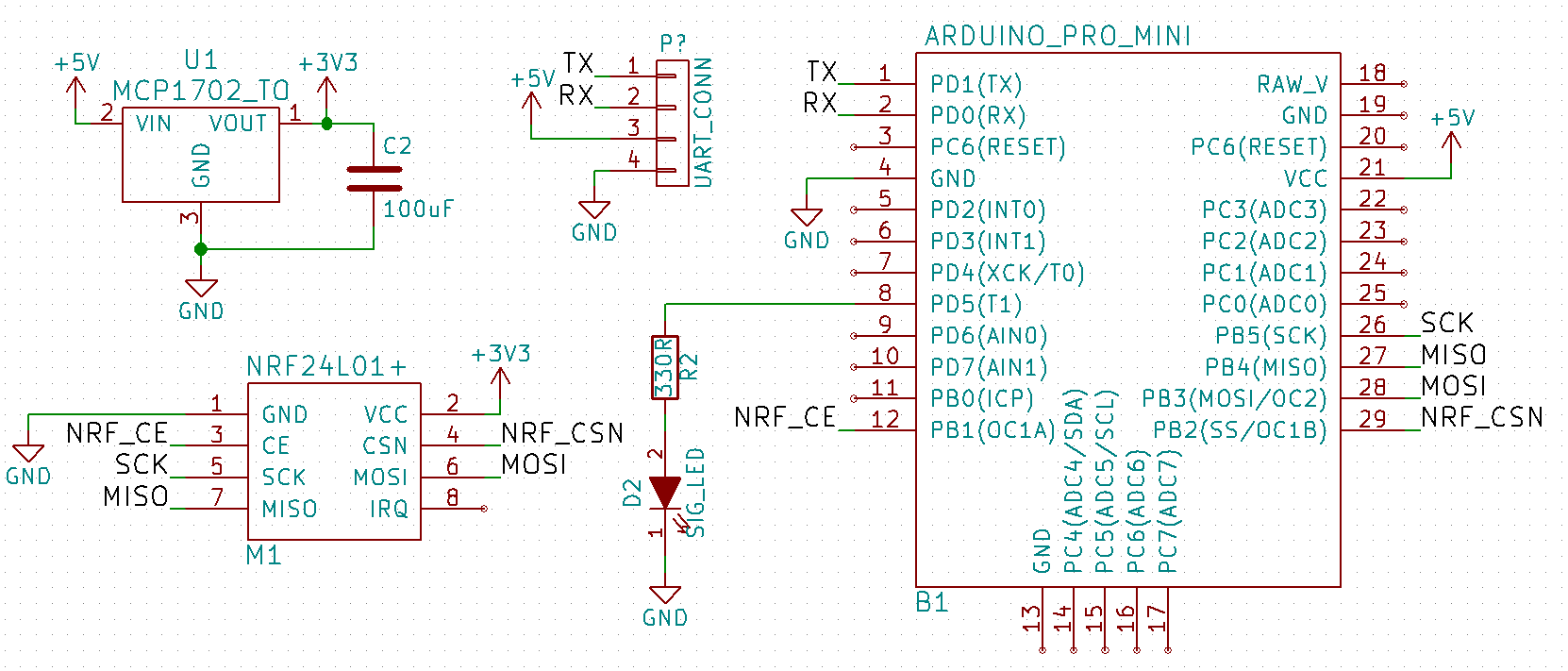
 Reveiver schematic:
Reveiver schematic:
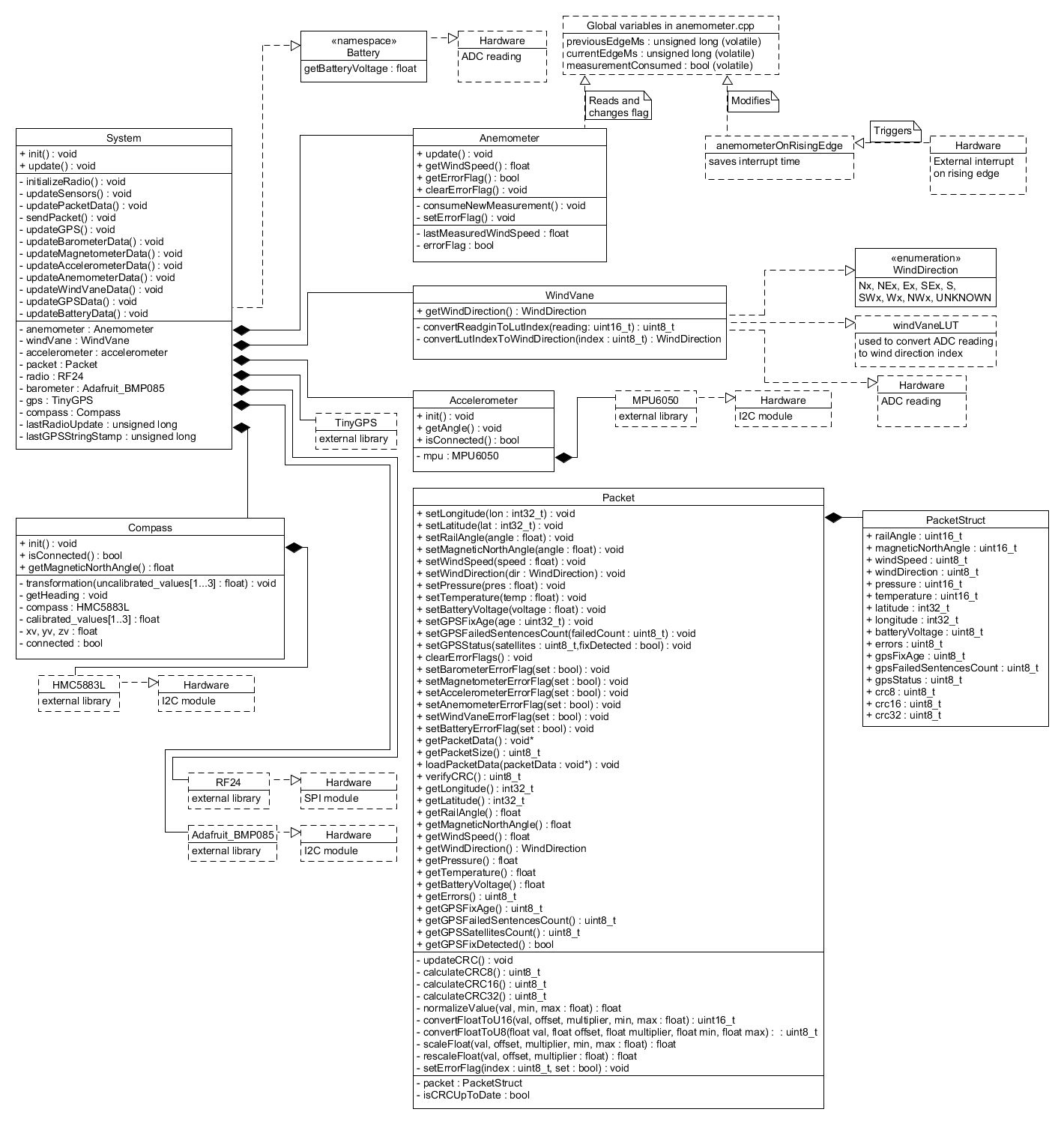
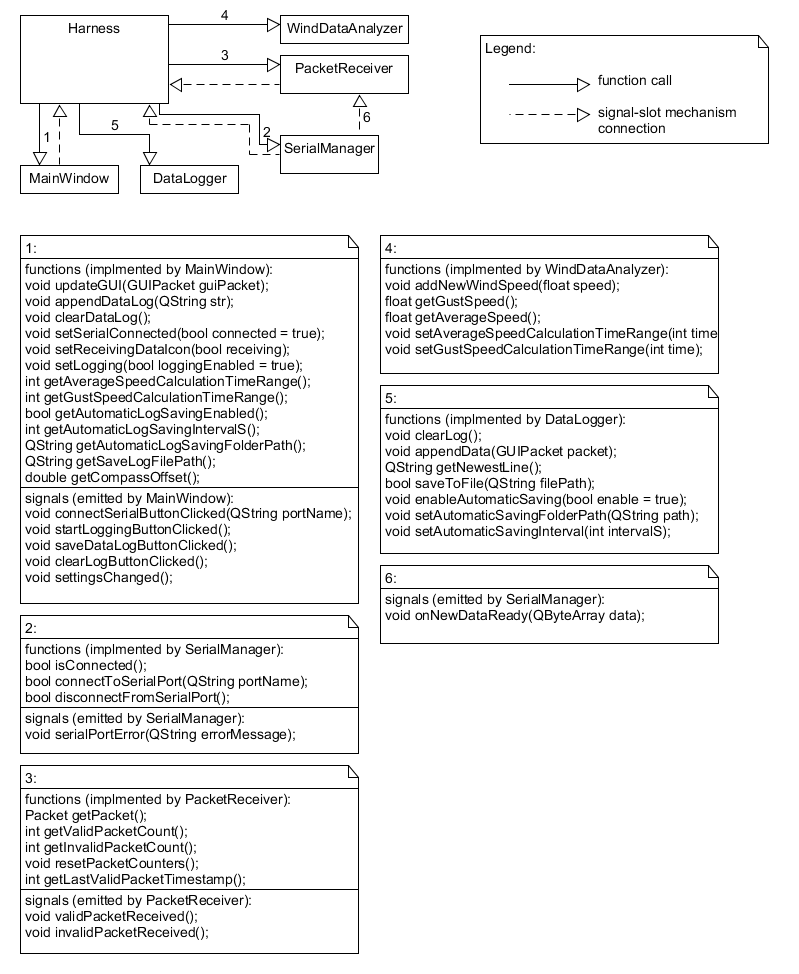
Transmitter unit software class diagram (also showing interaction with hardware):
 PC application block diagram
PC application block diagram
Data collection system for Rocketry Division of Students’ Space Association
Already have an account? Log in.
To make the experience fit your profile, pick a username and tell us what interests you.
System overview:
Full transmitter schematic:
Reveiver schematic:
Transmitter unit software class diagram (also showing interaction with hardware):
PC application block diagram
I want the device to be as robust and reliable as possible.
I noticed that the microcontroller inside transmitter sends wrong values from I2C device when it's disconnected and reconnected during operation. The microcontroller tries to read the sensor without initalizing it (because it was already initialized once during system startup).
I added some code to detect when the device is disconnected and reconnected, so that it's reinitialized. I added software interface to the Compass and Accelerometer classes as they are kind of the same ("Disconnectable"), but the reading process is different for each device.
Digging a little deeper showed that the microcontroller also hangs sometimes when I connect and disconnect one of the I2C devices during operation. The hanging happens when the device is disconnected during I2C transaction - I suspect that Wire library is not implementing timeouts and it's waiting for some kind of signal on I2C bus from the device.
I had two options: modify Wire library or add watchdog to reset the device. I suppose that this hanging behaviour would never occur during normal operation (the connectors are pretty solid), but nevertheless it has to be eliminated somehow. I chose to try the watchdog path. Found some article online, setup the watchdog, test it and... it hangs! It turns out that standard Arduino bootloader (not the optiboot one) does not reset some register regarding watchdog, so during execution of bootloader code (after restart) the watchdog restarts the microcontroller again. And again. And again.
I switched to optiboot bootloader. Uploaded the sample code and woohoo! it works. But after I upload my code (transmitter) and play with the I2C connector - it hangs again, resets and locks in bootloader section (just like before). And then something else broke, because now the code hangs during NRF module initialization...
At that moment I had enough of this project for now and decided to call it a day. I'll try to fix it tomorrow.
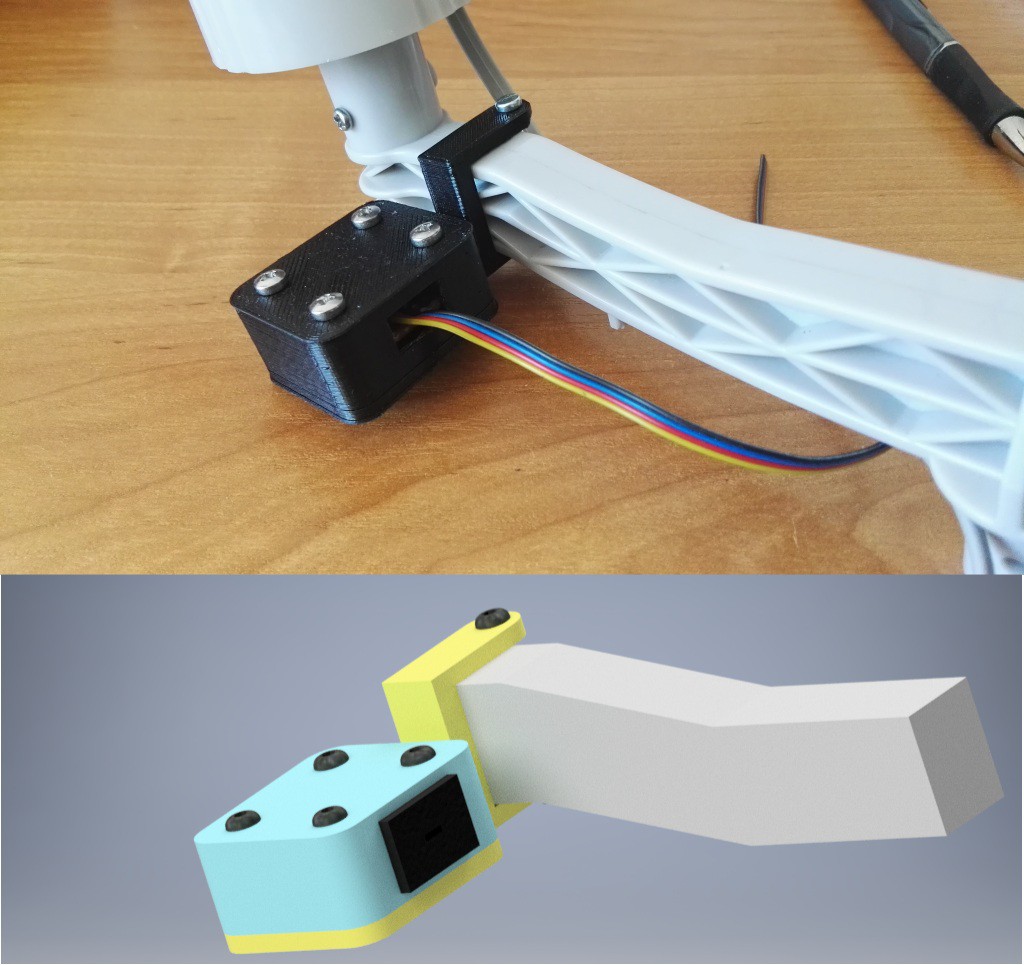
As i mentioned in previous log entry I tried to mount the magnetometer close to the anemoscope. This idea turned out to be wrong as the anemoscope has a megnt built-in.
I moved the magnetometer further by designing and printing 15 centimeter long offsetting element.
After calibration the compass works fine :)
I'd also like to mention that current software (embedded and PC app) is available at GitHub.
Embedded code: https://github.com/Lukaszm94/rocketLauncherDAQ_embedded
PC application: https://github.com/Lukaszm94/RocketLauncherDataAcquisitionApp
One of the information that needs to be collected by the system is launcher's orientation relative to Earth's magnetic field.
To achieve that I used HMC5883L magnetometer. Initially I mounted it inside main case, together with all the other electronics. It turned out to be a bad decision as the batteries distorted the magnetic field so much that it was impossible to calibrate the device.
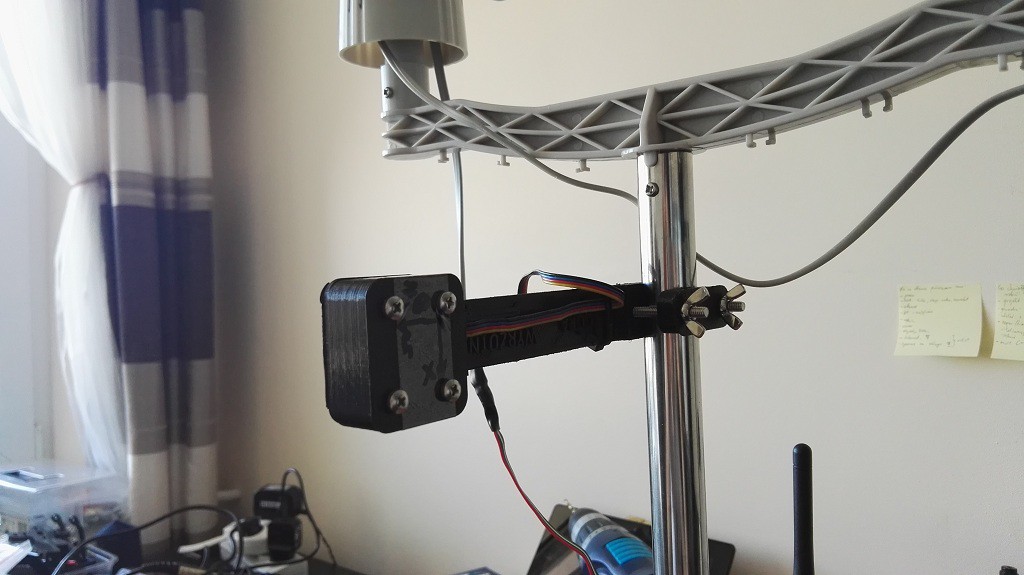
Then I tried moving the compass to weather station's arm:
 But I totally forgot about magnet inside anemoscope! It influences the readings as well. It's not possible to fully compensate for the magnetic field changes from the magent by calibrating the compass, as the magnet is moving when the wind direction changes.
But I totally forgot about magnet inside anemoscope! It influences the readings as well. It's not possible to fully compensate for the magnetic field changes from the magent by calibrating the compass, as the magnet is moving when the wind direction changes.
I'll have to move the compass away from the anemoscope and anemometer (which has a magnet built-in as well) - back to Inventor again.
BTW if anyone wondered what tools I use to calibrate the compass: http://diydrones.com/profiles/blogs/advanced-hard-and-soft-iron-magnetometer-calibration-for-dummies

 Curt White
Curt White
 Shubhangi Gupta
Shubhangi Gupta
 Rob Lauer
Rob Lauer