 trigo
trigoWe provide you with a bunch of ideas how it could be, you can use all the data you need from it (see license in code: main_brain.ino!). There are drawings and fotos showing the Wheeler detailed from all sides, a video showing it in action, the source code for the Arduino & Raspberry PI, a stack of 3D-Models to print out or as an inspiration, a parts list, also an electrical diagram and more. It's all free, check it out!
Yes, we know there are still a lot of unfinished items on the Wheeler, but take it as a challange to create your own tailor-made filament handler!
future ideas:
- filament endstop switch to stop the Wheeler automatically when the filament ends
- better cleaner for filament
- better user interface for easy change of parameters
- adaptable filament positioning simultaneously with the winding process
- new sensor for diameter measurement (instead of camera)
- combo power supply for arduino & raspberry PI
- webinterface for the measurement part
Mechanics
The A-axis is the source filament spool and the Z-axis is the drive wheel, so the filament goes from A to Z!
Angle profile used for the framework:

All volumes of printed parts in material list are per part and not cumulated.
We provide 2 sets of parts for this Wheeler since these should be printed in nylon:
- wheeler-gear-set (printed in nylon 910)
- wheeler-brake-set (printed in nylon 618)
Depending on the object to be printed choose nylon 910 when tension strength is needed or Nylon 618 if abrasion resistance or low friction is the main goal. All other parts can be of diverse material, we still recommend to take something strong. The forces that can occur under certain conditions may destroy weak parts.
A-axis (fixed axis)You can create specific spool adapters like axis_A_thickening.stl to
fit your filament spool. The provided one goes on a 8.2 mm rod and takes
taulmann spools (hole dia: 18.8 mm).
Spools can be easily changed with the rod clamp (A-axis wheel stop). The
double-face tape is needed to attach the rubber mat to the part
"wheel_stop_A_front3.stl".
To keep the filament under tension use this adjustable brake.

The small Nema 11 stepper motor is flexibly coupled to a M5 threaded rod.
Profile to use for the filament router:

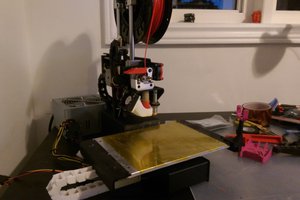
The 8mm steel rod (source: old laserprinter or similar) is driven
from a Nema 17 stepper motor with a holding torque of 0.44 Nm (62 oz
in). Total gear ratio is 1:36 which results in 15.84 Nm.
The coupling to the spool is made with honeycomb adapter. Like on the
A-axis there is a rod clamp here too (Z-axis wheel stop). Also the
rubber mat is attached to the part "wheel_stop_Z_front2.stl" by
double-face tape.
These could be made from plywood or any material strong enough. The
printed "wheel_Z_bar_X8.stl" has a 1.75mm & 3mm filament fixing
hole.
The Wheel parts are not included in the accumulated list.
It's very easy to use, just push the ONE button to start wheeling a new spool.
Main brain is the Arduino Nano controlling all the things. The Rapsberry PI camera is connected to it as slave over I2C.
Have a look at the included "Electrical_diagram_Wheeler.pdf" for
creation of the perfboard and further information. You have to choose
your own case for electronic components! It's best practice to make
cables pluggable instead of soldering it directly.
3 pieces of code are available at the moment:
- Arduino main brain "main_brain.ino"
- Raspberry PI photo slave "photo_slave.py"
- Raspberry PI diameter analyzer "diameter_analyzer.py"
The Raspberry PI scripts are based on python, have a look at the header for library information.
Some user settings are prepared in the header of each code.
Needed libraries in arduino code:
- "Wire.h" https://www.arduino.cc/en/Reference/Wire
- "AccelStepper.h" http://www.airspayce.com/mikem/arduino/AccelStepper/
A shot taken with the Raspberry PI cam.

Clearly the camera case should be...
Read more »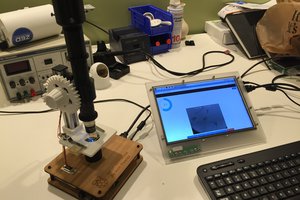
 Shivam Mehta
Shivam Mehta
 E/S Pronk
E/S Pronk