 Jack Qiao
Jack QiaoAfter experimenting (and failing) at a couple of ways of doing SLAM I've settled on the classic design of a 2d LIDAR for room mapping, supplemented with a front-facing depth sensor for obstacle detection.
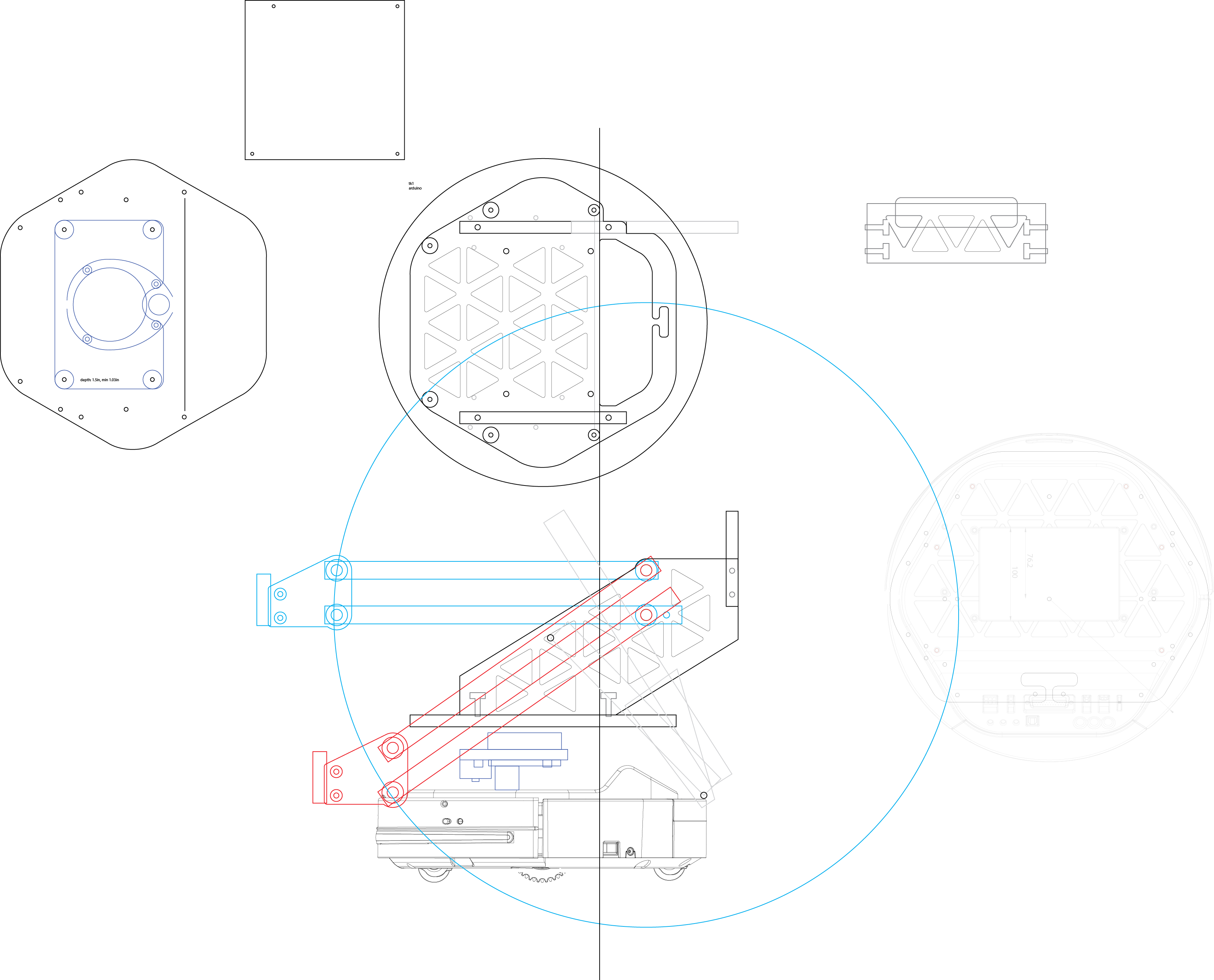
Instead of a fully custom robot I'll be using a Kobuki base and putting my stuff on top. With the power constraints I will have to replace the mini-itx board with a jetson tk1, hopefully Ubuntu on ARM won't be too much of a pain. Here's what the prototype will look like:
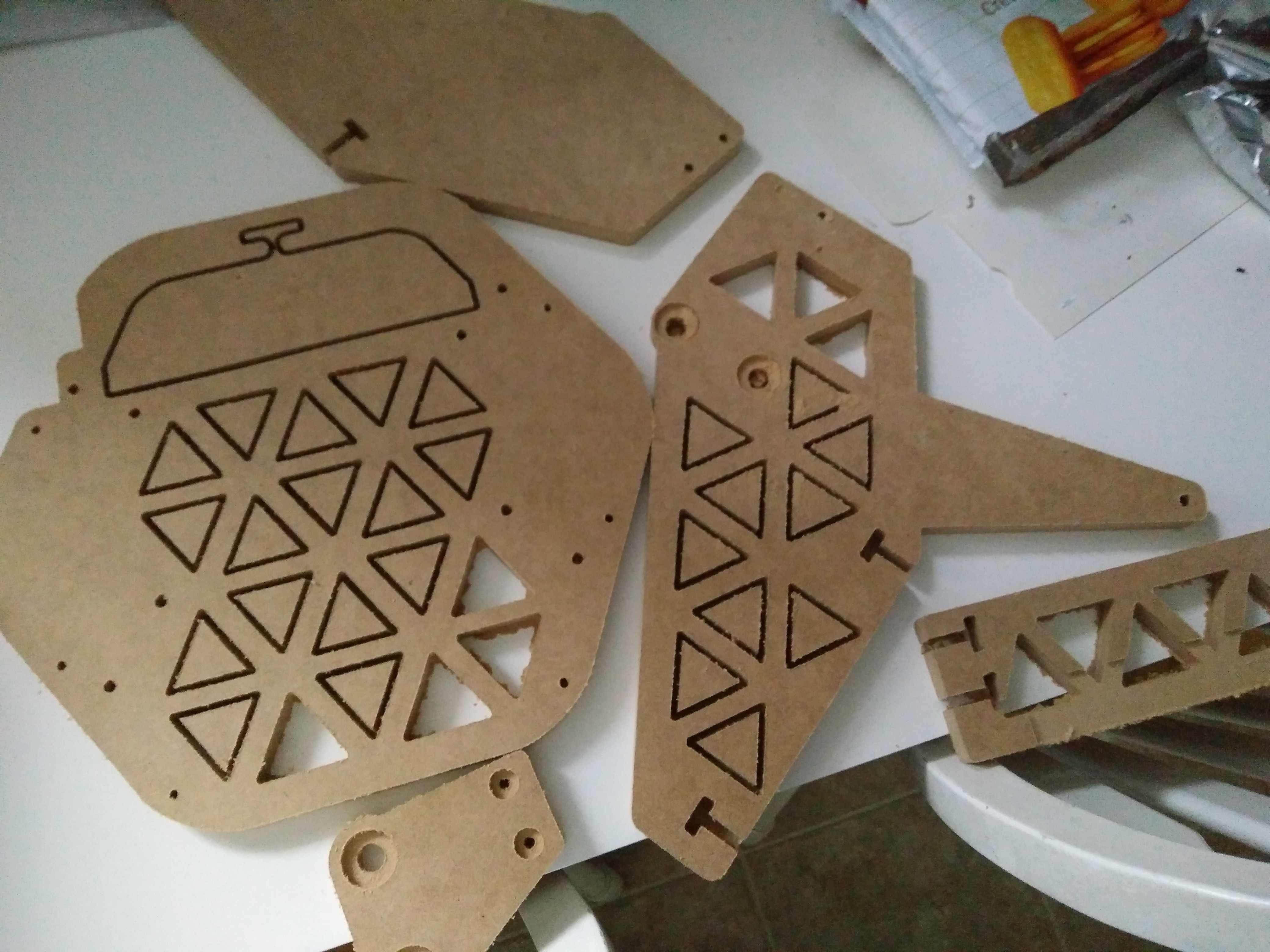
and the boards all cut out:
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.