 Jack Qiao
Jack Qiaoso the first task the robot will perform is bin picking. Eg. you could use voice command to tell the robot "get me a 1 kilo-ohm resistor", and it will fetch the bin and bring it to you. Afterward it will put the bin back on the shelf.
the design of the bin is constrained by the accuracy of the robot. The bins must be shaped so that they can be reliably gripped from any angle, and they have to be tolerant to being picked up or dropped a few cm from their rest position.
this is what I came up with
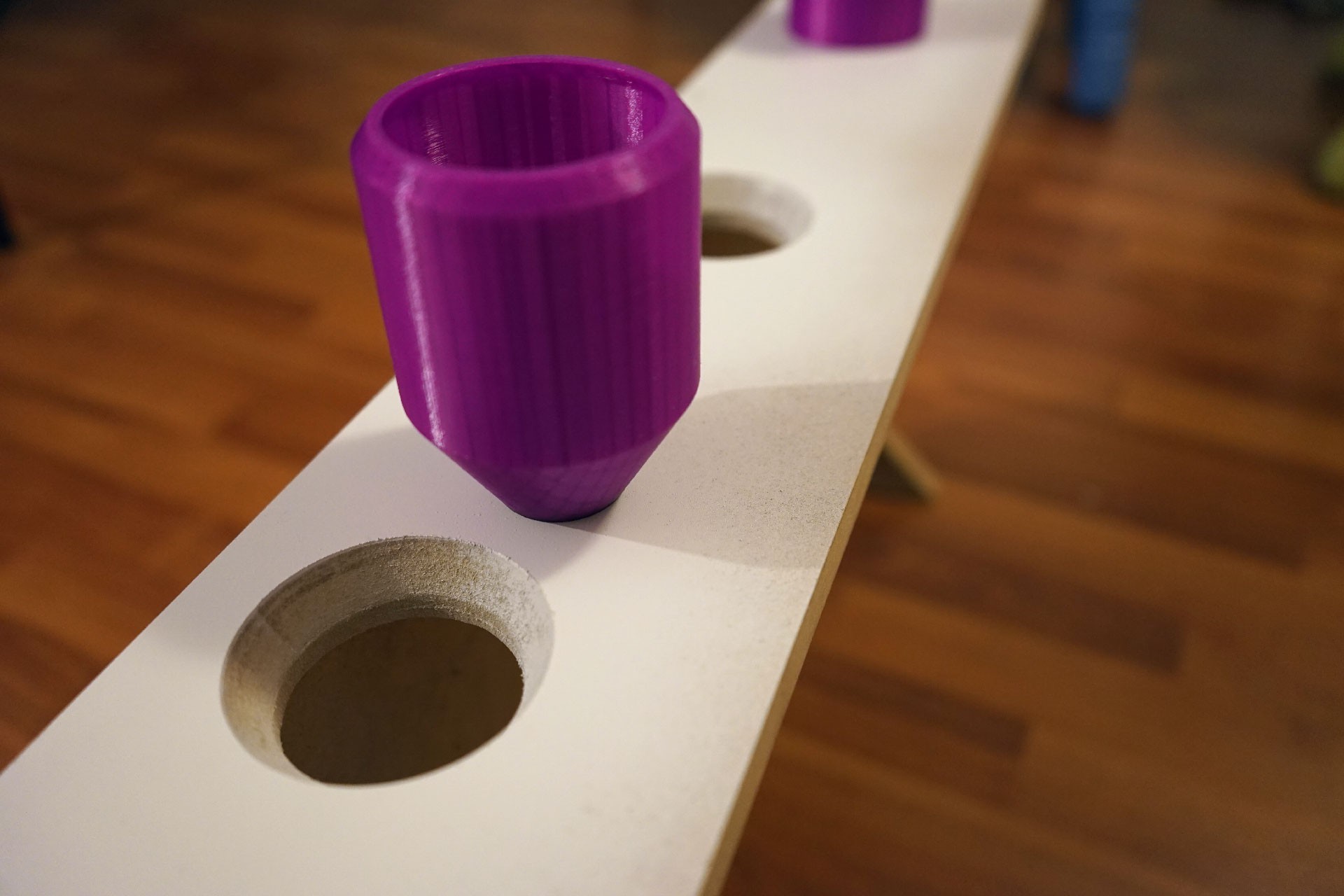
the container is cylindrical to be easy to grasp, and when dropped into its slot it will always come to rest at the same spot. The interior of the bin tapers up so that the center of gravity is low, and when dropped with some inaccuracy won't tend to bounce around too much.
I CNC'd the bevel into the slots to match the bin, but thinking about it now it's not really necessary.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.