0%
0%
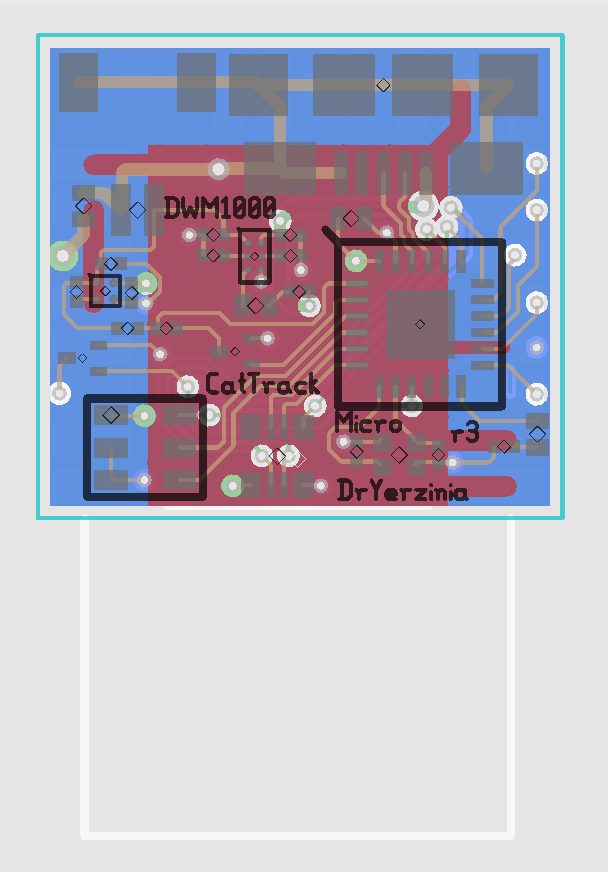
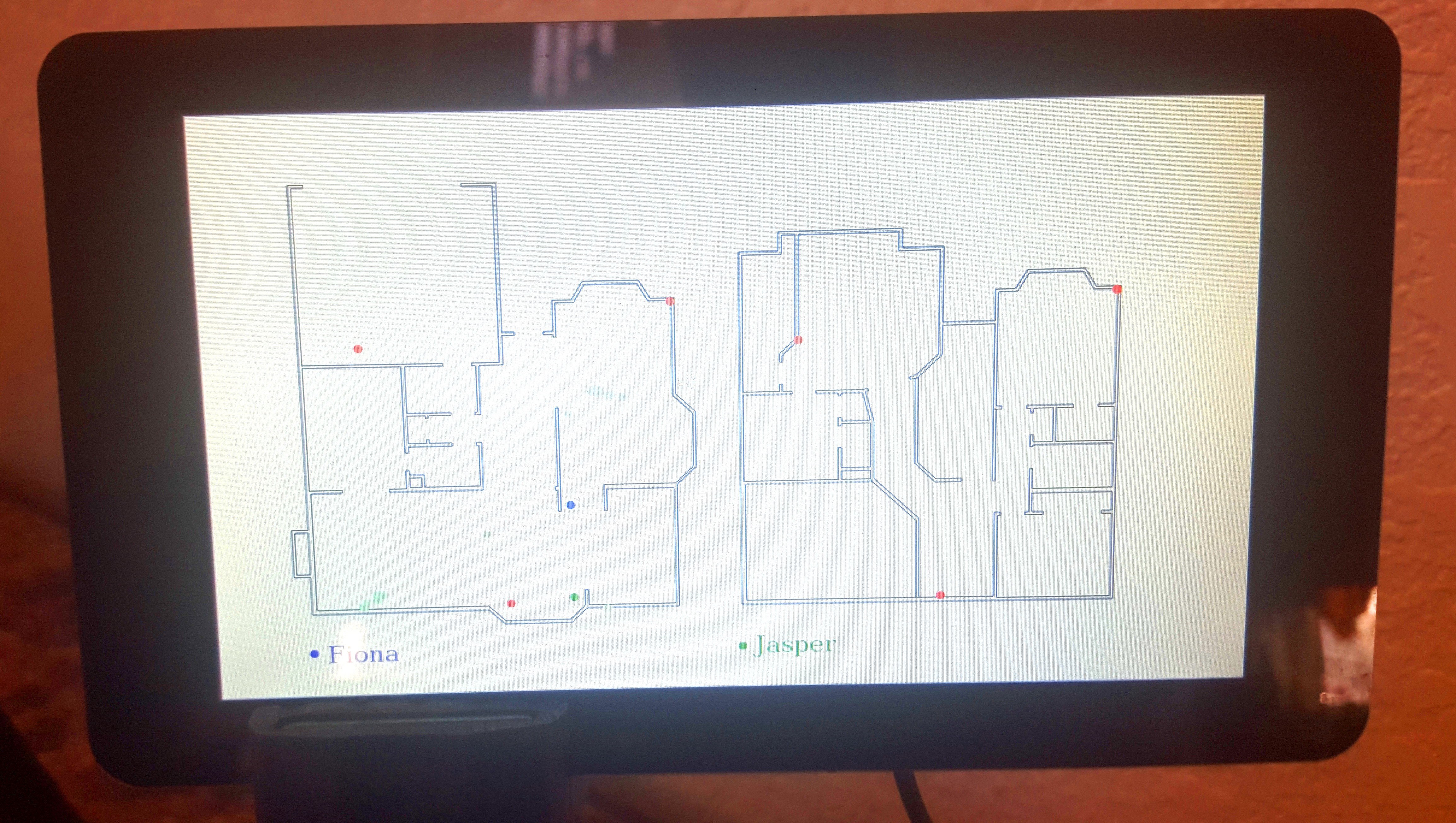
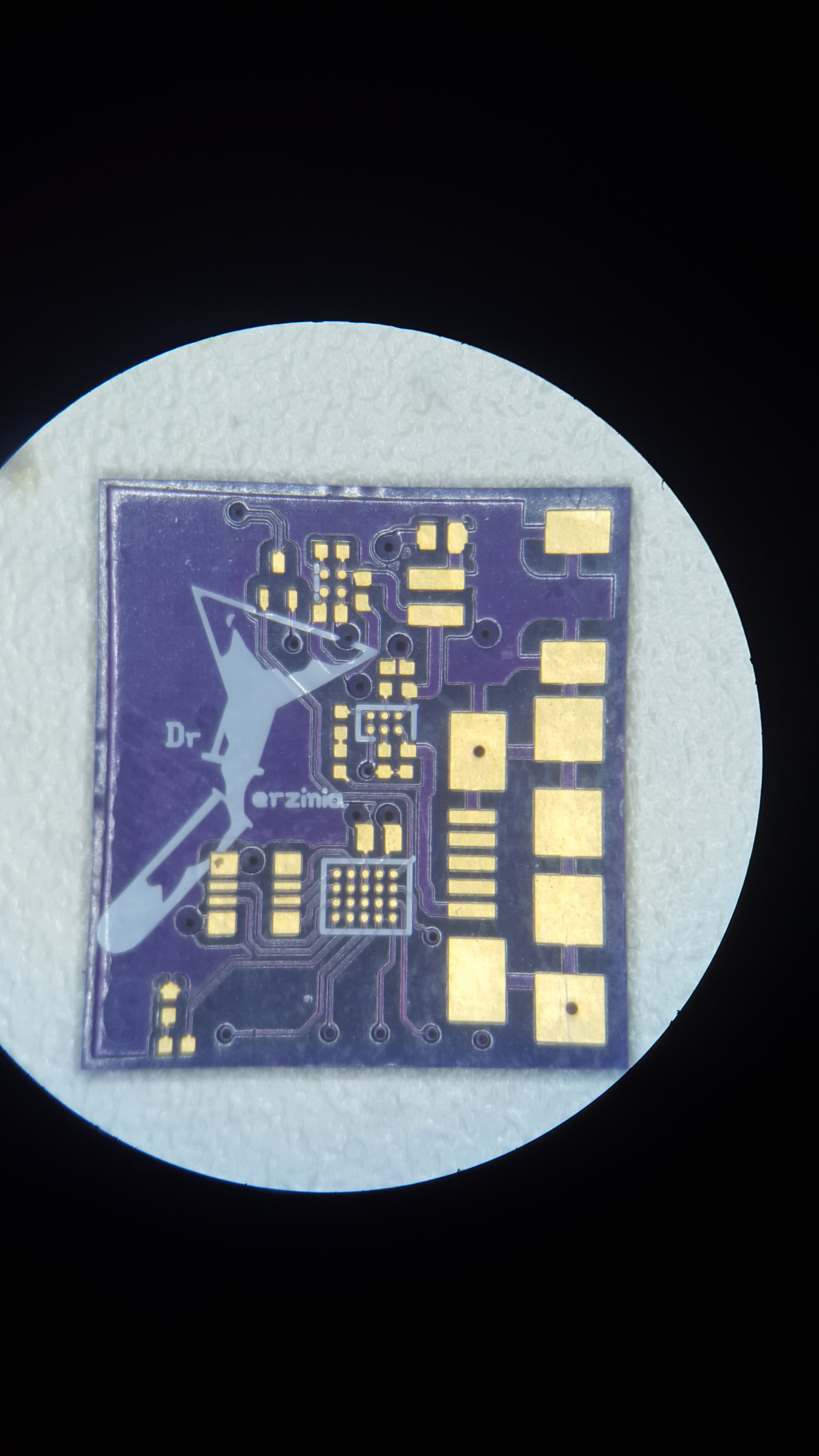
DWM1000 Cat Tracker
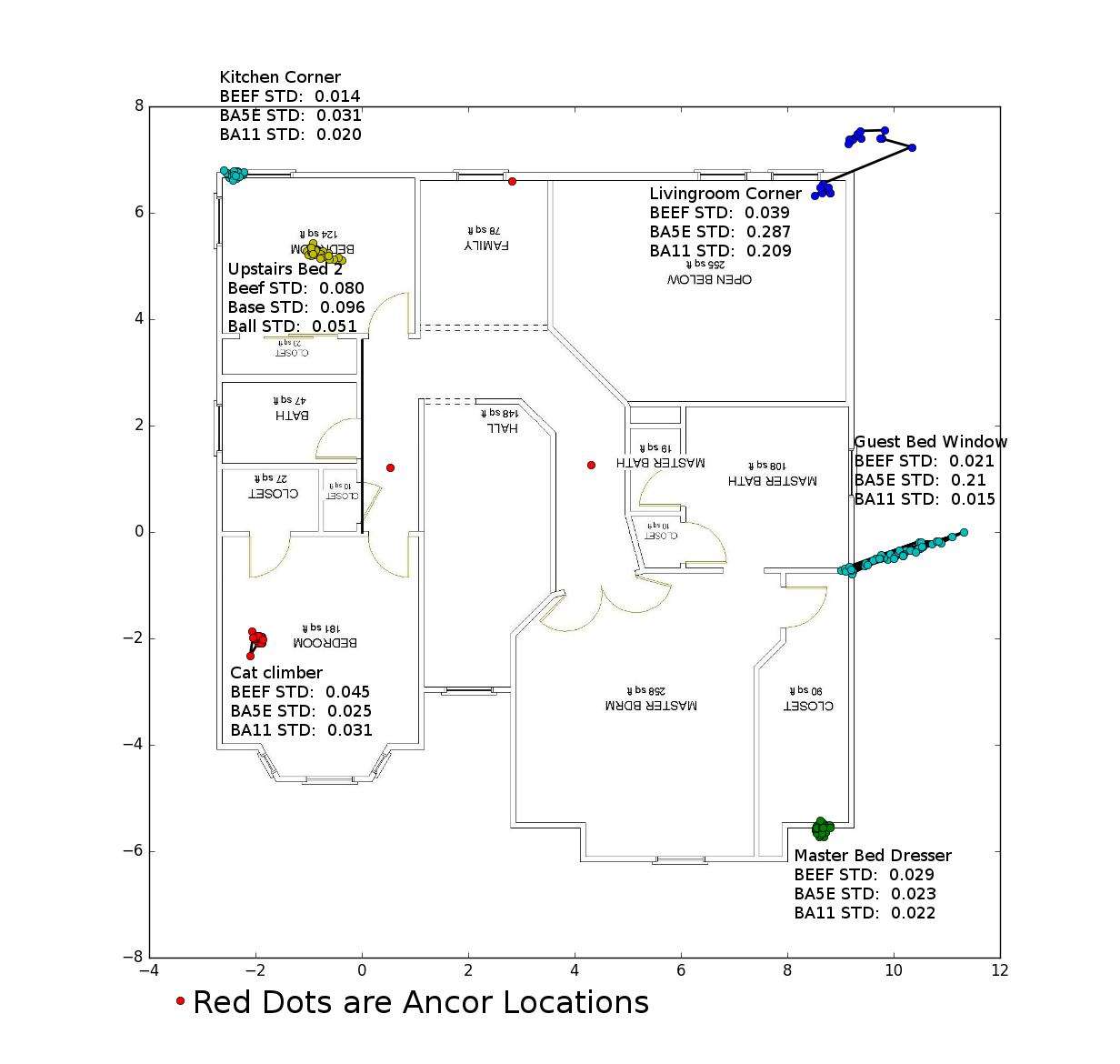
Using the DWM1000s amazing ability to pinpoint tags to within 10cm we will track the cats positions in the house with amazing precision.
 DrYerzinia
DrYerziniaBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
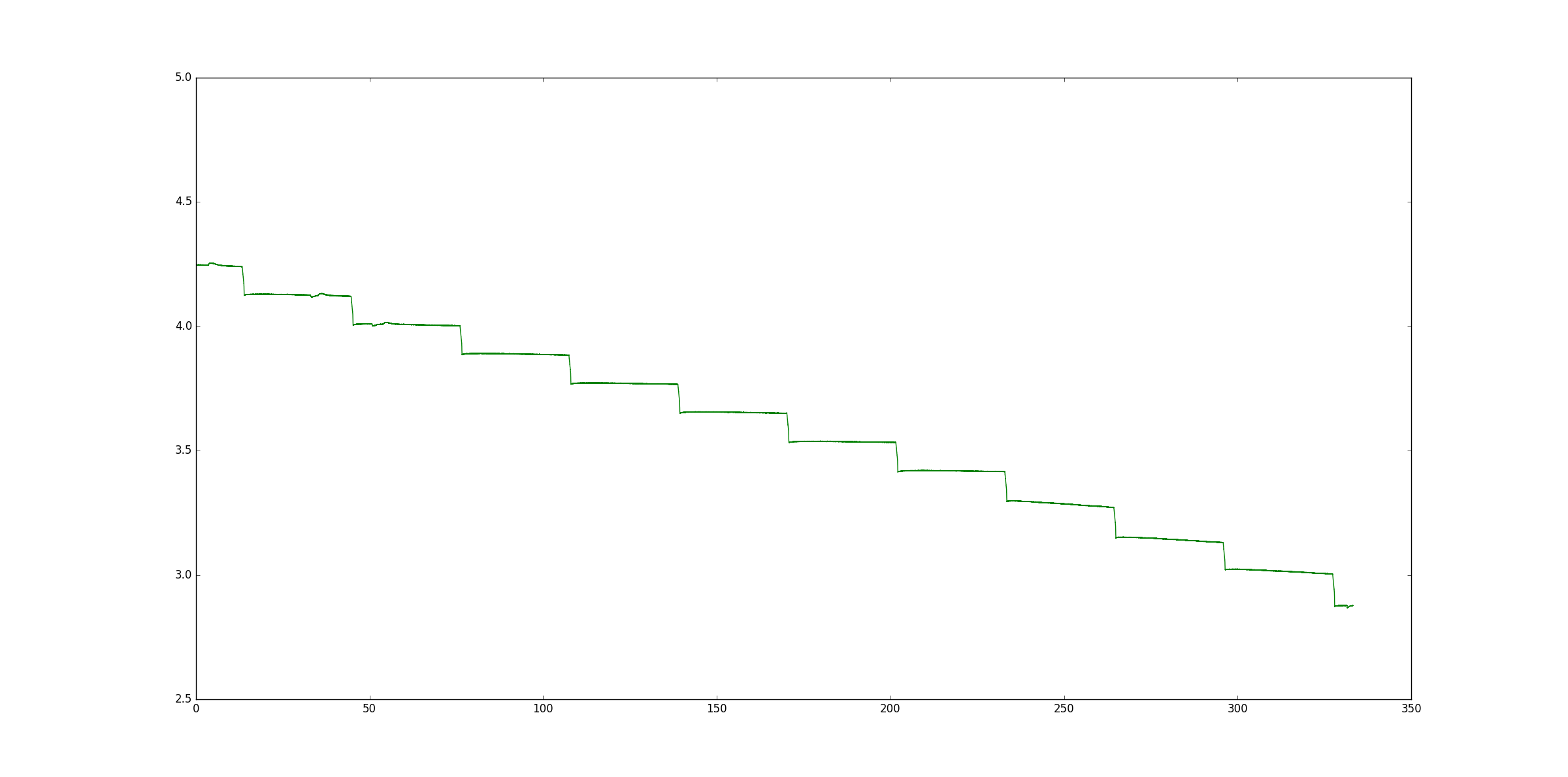
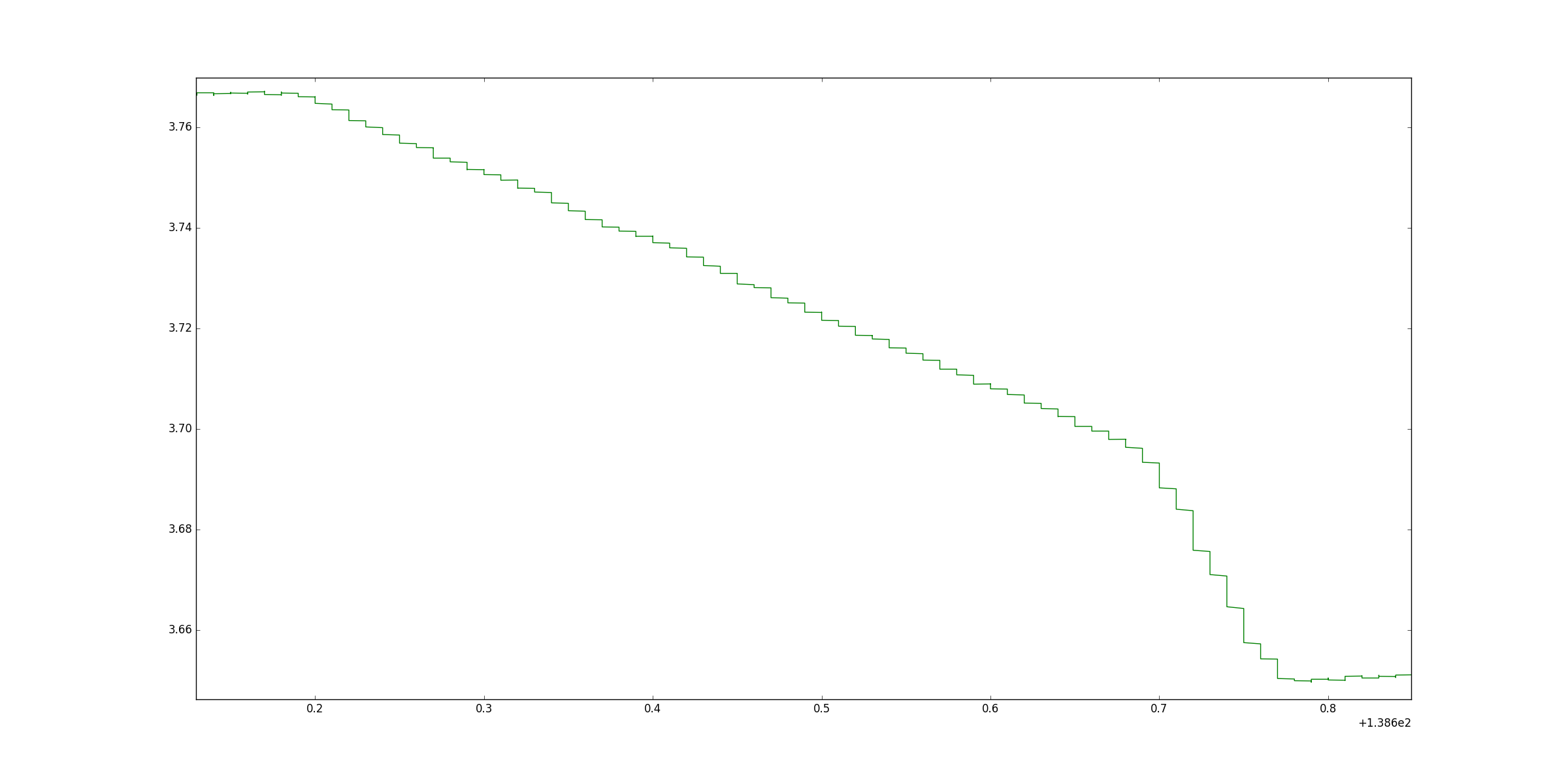
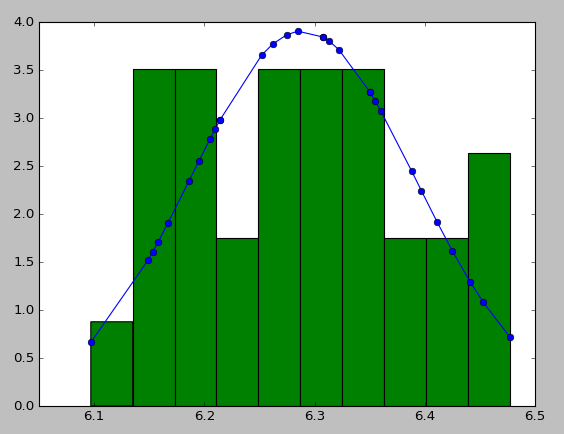
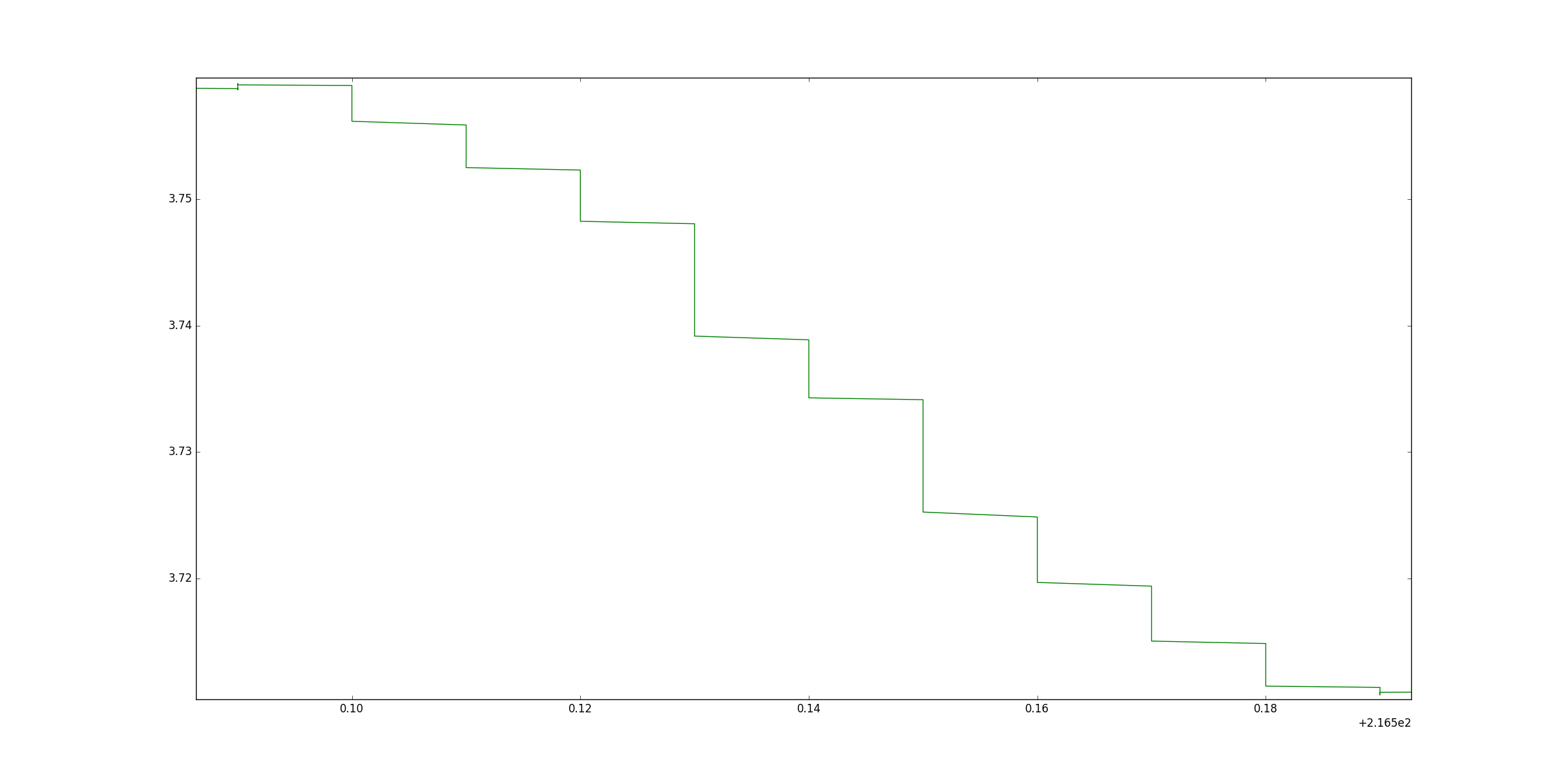 A 55% change in voltage drop and instead of 600ms it only takes 80ms. Now instead of 44 days I should get 90 days out of the battery. Hopefully this plus motion sensing and combing the 3 ranging into a single shot will let me shrink the battery and also give it a year long run time.
A 55% change in voltage drop and instead of 600ms it only takes 80ms. Now instead of 44 days I should get 90 days out of the battery. Hopefully this plus motion sensing and combing the 3 ranging into a single shot will let me shrink the battery and also give it a year long run time.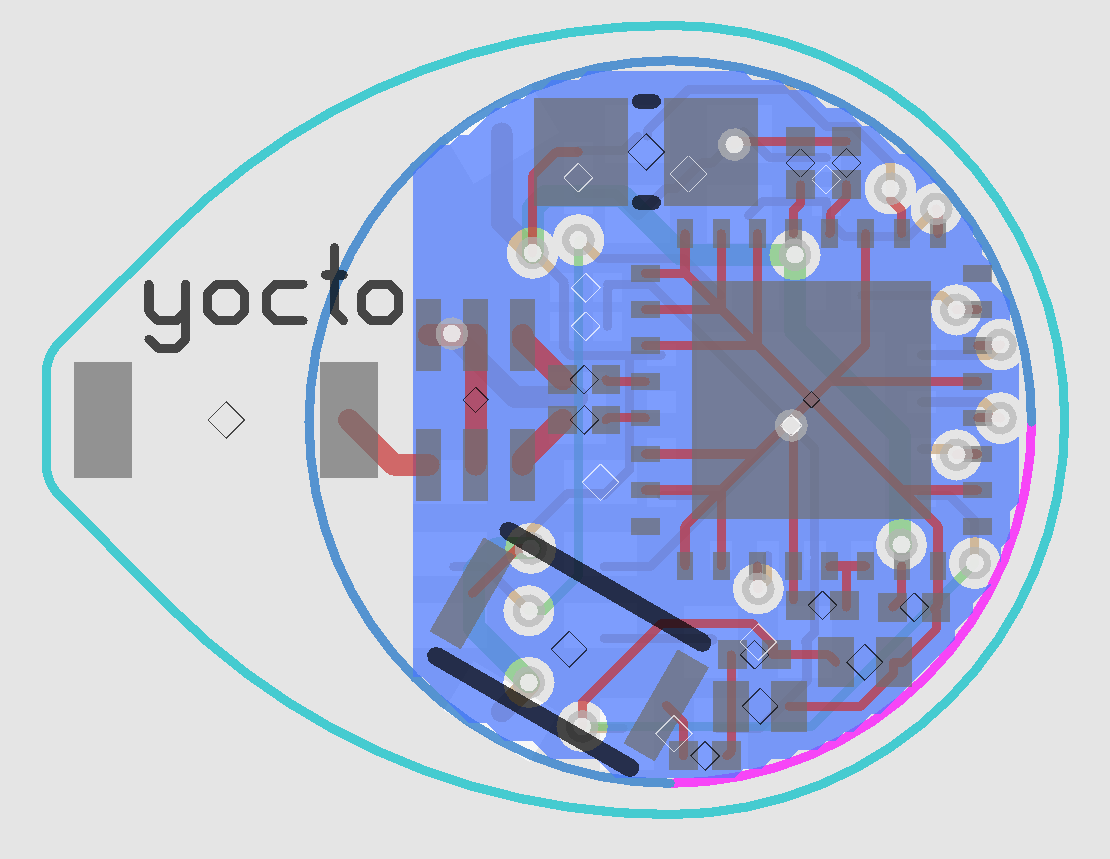







 Bud Bennett
Bud Bennett
 Matias N.
Matias N.
 Mike Cochrane
Mike Cochrane
 AccidentalRebel
AccidentalRebel
Did you do anything after? Right now I'm using BLE to track my cat. On collar with CR2302 battery directly connected to BLE module without any controller. It has 6 seconds interval (max for firmware) and it lasts now for 4 months. I expect at least 8. Vibration would help to save a lot, but then I have to use attiny or something with min usage.