 Jeremy g.
Jeremy g.Things to get done, and veted:
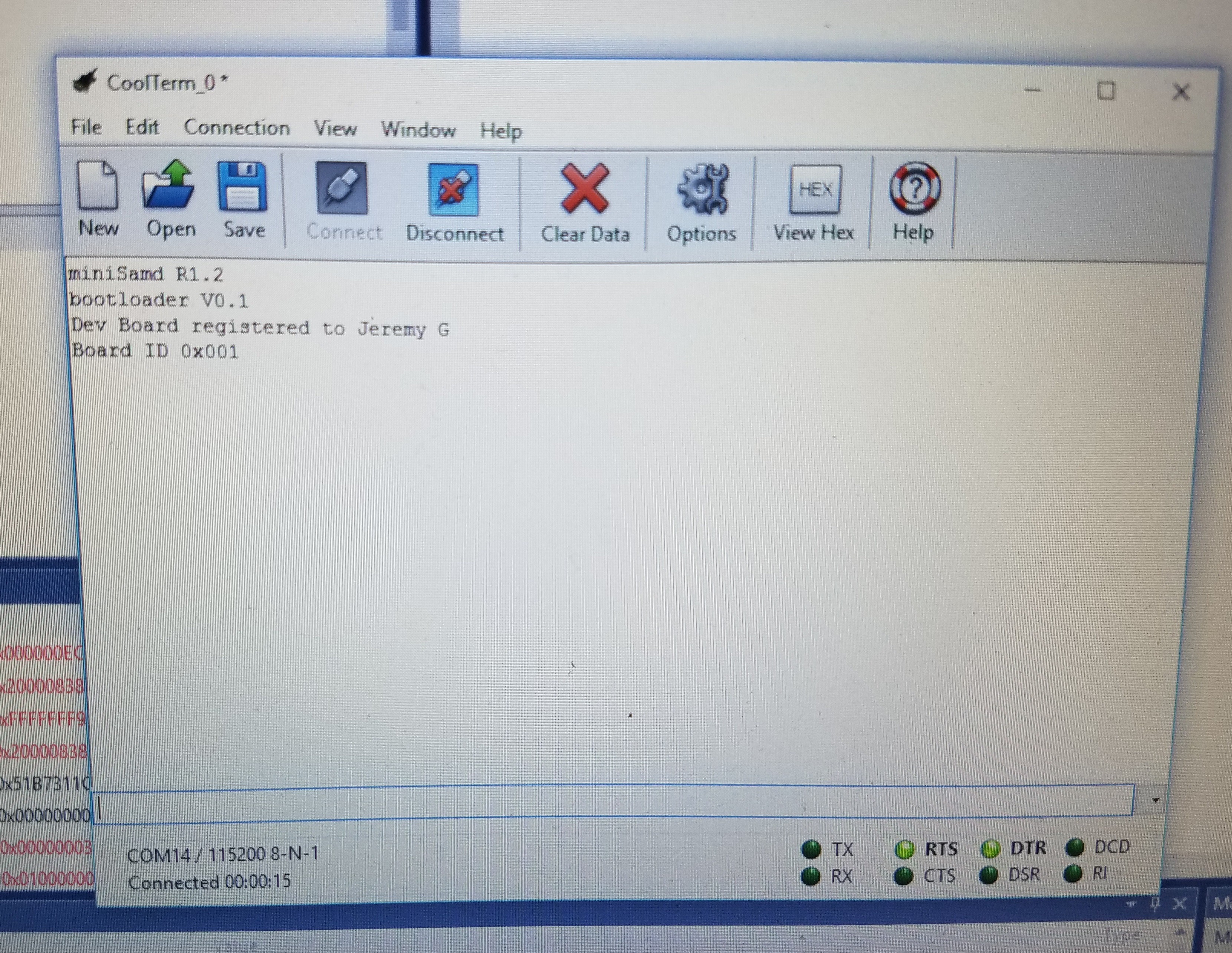
- Serial usart. (Working, fixed in R1.2)
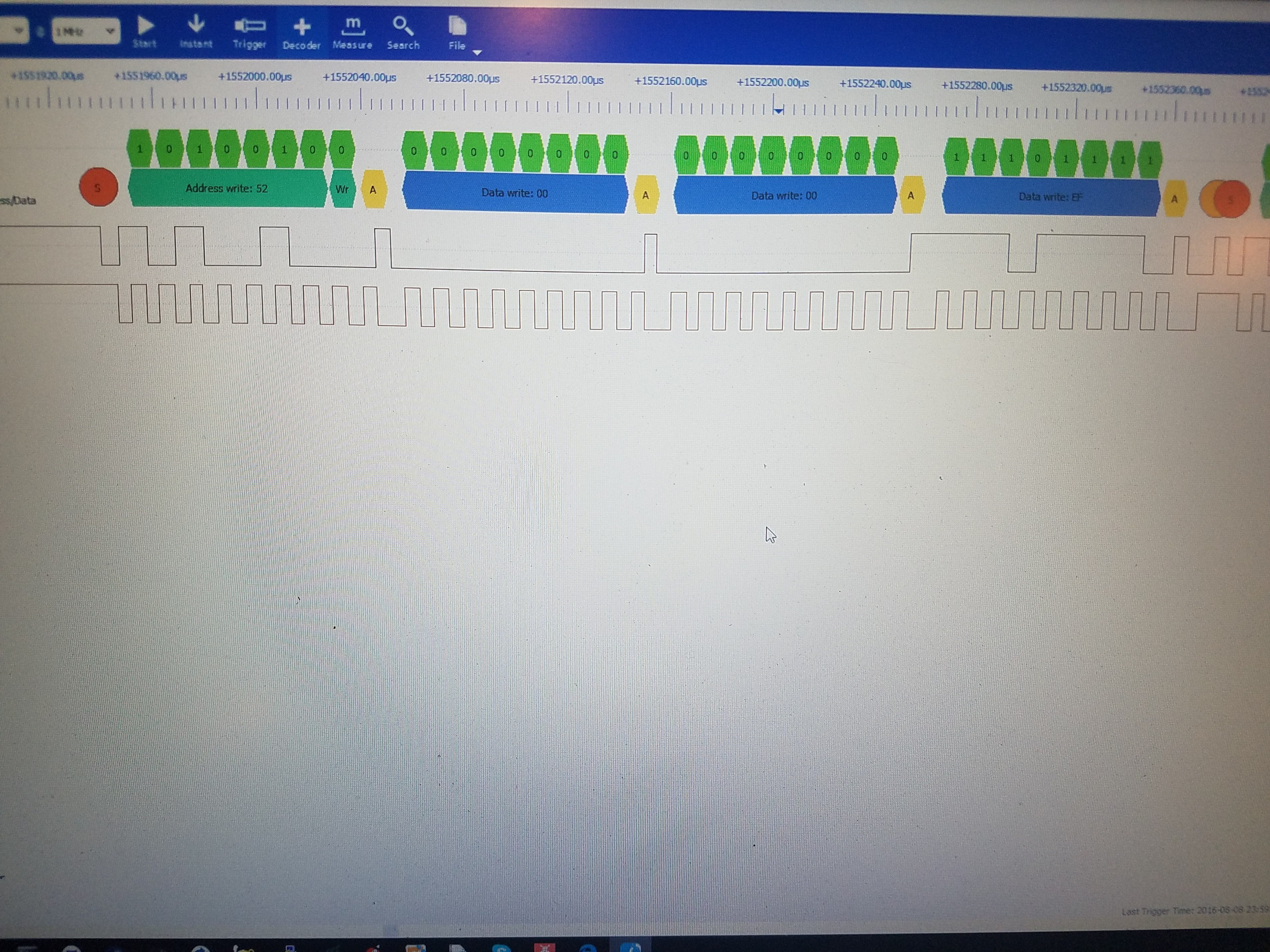
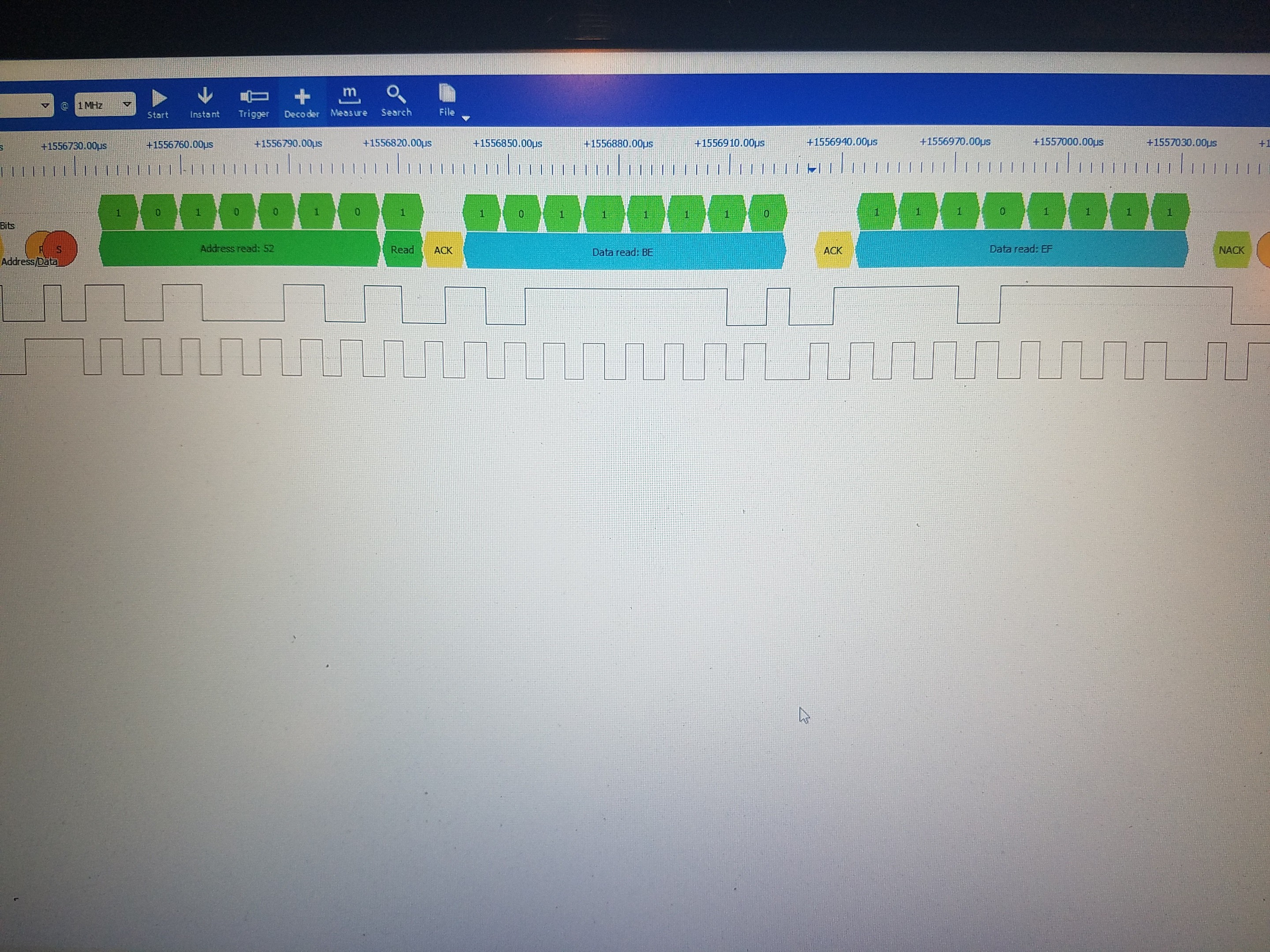
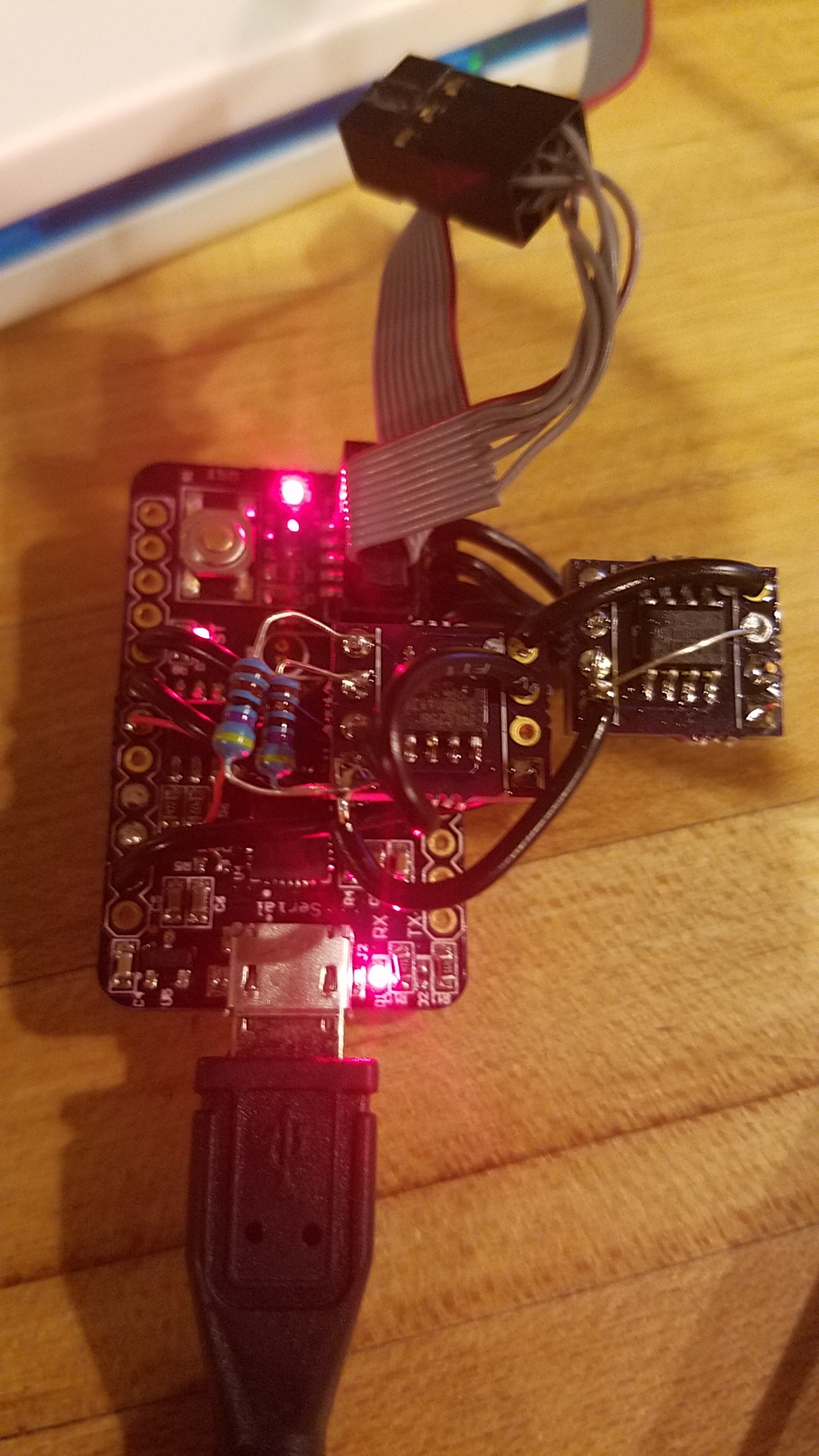
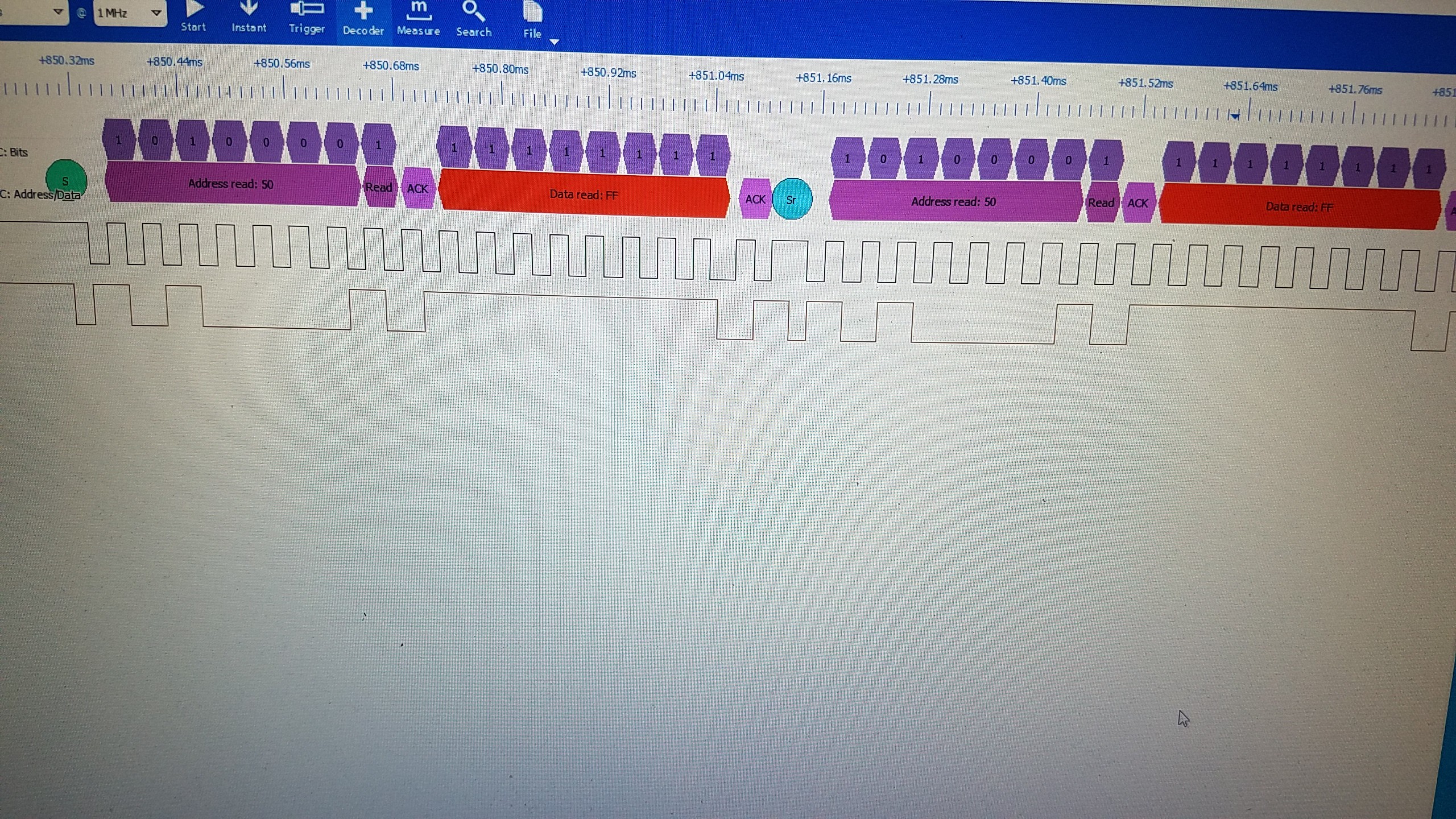
- I2C master. (Working with R1.4.1, a bit finicky but works.)
- ADC
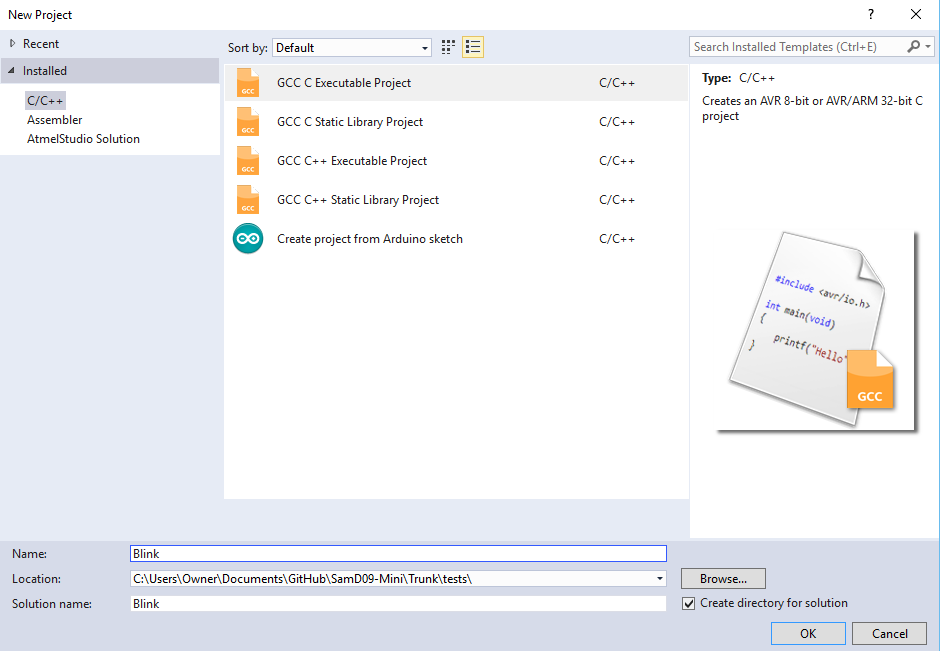
- Led blink test (DONE WORKS)
- reset button test (DONE WORKS)
- Varify EEPROM (Working R1.4.1)
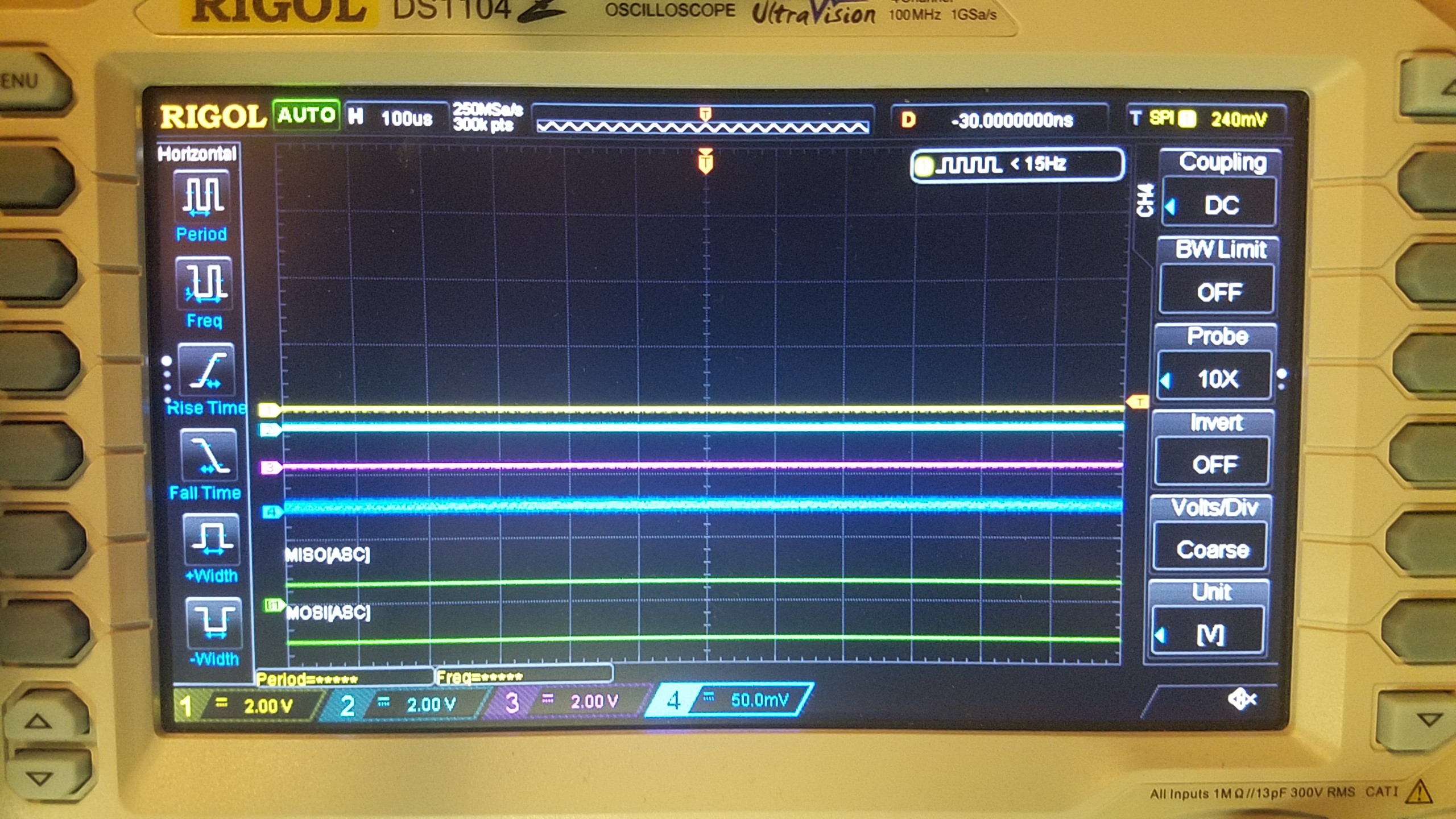
- Configure and test SPI. (will verify with R1.3)
Code stuffs:
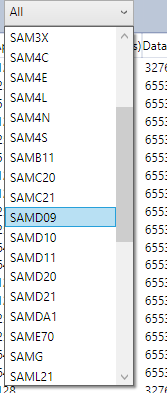
- Configure clocks (clock now have their own library for startup.)
- Stay away from afs as much as possible. (Doing ok, I think.)
- Create custome libraries. (Working on it. But libraries are all present in atmel studio 7.)
- Code base (Work in progress)
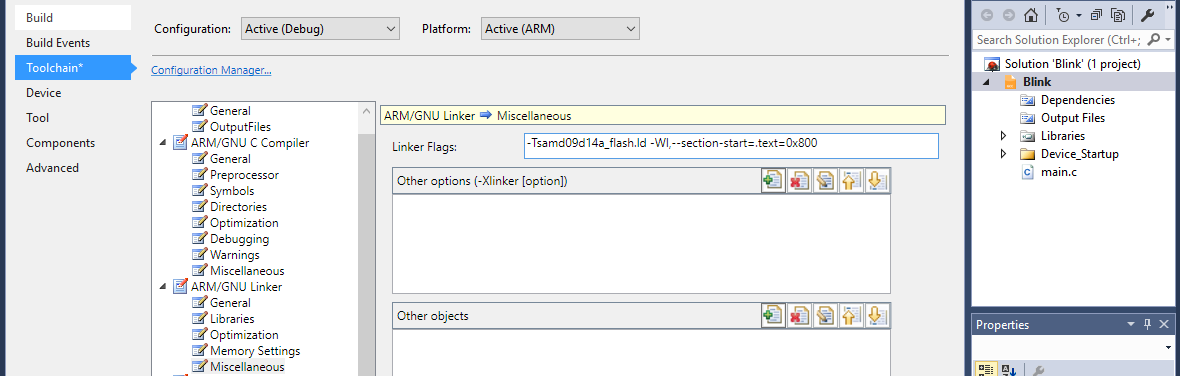
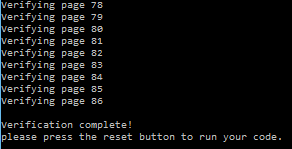
- Serial bootloader R1.3 :(DONE)
- Get bootloader working on al1's board (CONFIRMED WORKING).
- Arduino IDE compatability (<- this is going to be fun....)
R1.4.1 is built, tested, and fore sale. The board design is currently frozen.








 George
George
 Kaili Hill
Kaili Hill
 techav
techav
 forthnutter
forthnutter
Pretty neat, keep it up!