 AndrewMcDan
AndrewMcDanI've spent the past couple days working various parts of this project, and I have completed the controller for the climate control system.
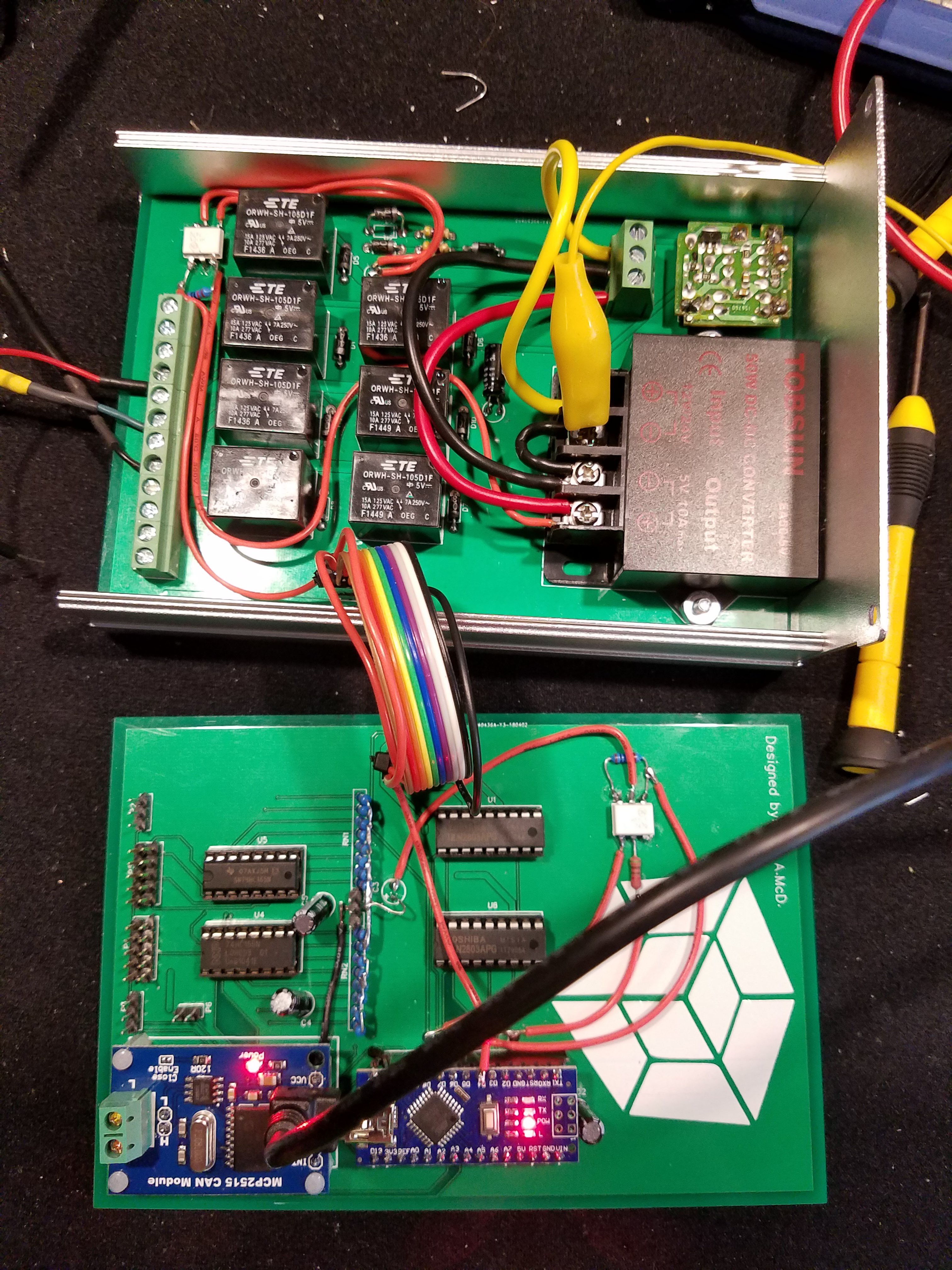
Relays for controlling the fan, 5V DC-DC switched power supply, timer circuit from the original rear-window-defrost, CAN-bus controller, and an Arduino. The headers on the left of the bottom board are for the servos and encoders that interface with the OEM push-pull cable system.
Here's the code for the Arduino:
#include <Servo.h>
#include <mcp_can.h>
#include <SPI.h>
#include <EEPROM.h>
#define CAN_INT 2
#define AC_STATUS 5
#define SERVO_2 6
#define SERVO_1 7
#define LOAD_DATA 8
#define CLK_INH 9
#define CAL_BTN 3
#define FAN_SET1 A0
#define FAN_SET2 A1
#define FAN_SET3 A2
#define FAN_SET4 A3
#define DEF_TOG A4
#define AC_EN A5
#define RECIRC_EN A6
#define AC_STATUS_ANALOG A7
#define DEF_STATUS 4
MCP_CAN CAN0(10);
bool CANgood = false, def_toggle = false, AC_enable = false, recirc_enable = false;
long unsigned int rxId;
unsigned char len = 0;
unsigned char rxBuf[4], txBuf[4];
Servo servo1, servo2;
unsigned int encoders1 = 0, encoders2 = 0;
int numberOfPositions_1 = 0, numberOfPositions_2 = 0;
byte fans = 0, temp_1 = 0, destination = 0;
unsigned long time = 0,time2=0;
void setup() {
Serial.begin(115200);
pinMode(CAN_INT, INPUT);
pinMode(AC_STATUS, INPUT);
pinMode(DEF_STATUS, INPUT);
pinMode(SERVO_2, OUTPUT);
pinMode(SERVO_1, OUTPUT);
pinMode(LOAD_DATA, OUTPUT);
pinMode(CLK_INH, OUTPUT);
pinMode(CAL_BTN, INPUT_PULLUP);
pinMode(FAN_SET1, OUTPUT);
pinMode(FAN_SET2, OUTPUT);
pinMode(FAN_SET3, OUTPUT);
pinMode(FAN_SET4, OUTPUT);
pinMode(DEF_TOG, OUTPUT);
pinMode(AC_EN, OUTPUT);
pinMode(RECIRC_EN, OUTPUT);
digitalWrite(FAN_SET1, LOW);
digitalWrite(FAN_SET2, LOW);
digitalWrite(FAN_SET3, LOW);
digitalWrite(FAN_SET4, LOW);
digitalWrite(RECIRC_EN, LOW);
digitalWrite(AC_EN, LOW);
digitalWrite(DEF_TOG, LOW);
digitalWrite(CLK_INH, HIGH);
digitalWrite(LOAD_DATA, HIGH);
//digitalWrite(CAL_BTN, HIGH);
servo1.attach(SERVO_1);
servo2.attach(SERVO_2);
if (CAN0.begin(CAN_1000KBPS) == CAN_OK) {
CAN0.init_Mask(0, 0, 0x7Ff);
CAN0.init_Mask(1, 0, 0x7ff);
CAN0.init_Filt(0, 0, 0x00e); // climate control data
CAN0.init_Filt(2, 0, 0x00e);
CAN0.init_Filt(3, 0, 0x00e);
CAN0.init_Filt(4, 0, 0x00e);
CAN0.init_Filt(5, 0, 0x00e);
Serial.print("can init ok!!\r\n");
CANgood = true;
}
else {
Serial.println("not ok");
//while (true) {}
Serial.println("continuing");
}
if (!digitalRead(CAL_BTN)) {
Serial.println("calibration");
calibrateEncoders();
}
for (int i = 0; i < 4; i++) {
txBuf[i] = 0;
}
}
void loop() {
// every 500 ms, send an update to the main controller
if ((millis() - time) > 500) {
time = millis();
txBuf[0] = txBuf[0] | fans;
txBuf[0] = txBuf[0] | (def_toggle << 4);
txBuf[0] = txBuf[0] | (AC_enable << 5);
txBuf[0] = txBuf[0] | (recirc_enable << 6);
txBuf[1] = temp_1;
txBuf[2] = destination;
txBuf[3] = analogRead(AC_STATUS_ANALOG)>300?1:0 | (digitalRead(DEF_STATUS) << 1);
CAN0.sendMsgBuf(0x7ff, 0, 4, txBuf);
Serial.print("AC status: ");
Serial.println(digitalRead(AC_STATUS));
Serial.print("Defroster Status: ");
Serial.println(digitalRead(DEF_STATUS));
Serial.println("");
}
// This is here for testing purposes
/*if((millis()-time2)>5000){
time2=millis();
//def_toggle = true;
recirc_enable = !recirc_enable;
AC_enable = !AC_enable;
if(fans==16){
fans=0;
}else if(fans==0){
fans=1;
}else{
fans = fans << 1;
}
}*/
// If the CAN bus has new data for this controller, read it an do stuff with the data
if (!digitalRead(CAN_INT) && CANgood) {
CAN0.readMsgBuf(&len, rxBuf);
rxId = CAN0.getCanId();
if ((rxId == 0x00e) && (len >= 3)) {
fans = rxBuf[0] & B00001111;
def_toggle = rxBuf[0] & B00010000;
AC_enable = rxBuf[0] & B00100000;
recirc_enable = rxBuf[0] & B01000000;
temp_1 = rxBuf[1];
destination = rxBuf[2];
}
}
// we only want to turn on one of the fan signals at a time, so check to make sure that only one bit is set high or all are low
if (countSetBits(fans) <= 1) {
digitalWrite(FAN_SET1, fans & B00000001);
digitalWrite(FAN_SET2, fans & B00000010);
digitalWrite(FAN_SET3, fans & B00000100);
digitalWrite(FAN_SET4, fans & B00001000);
}
// send a pulse to the defrost timer
if (def_toggle) {
digitalWrite(DEF_TOG, HIGH);
delay(200);
digitalWrite(DEF_TOG, LOW);
def_toggle = false;
}
digitalWrite(AC_EN, AC_enable);
digitalWrite(RECIRC_EN, recirc_enable);
updateServos(temp_1 , destination );
}
bool updateServos(byte servo_1_pos, byte servo_2_pos)
{
// A lot goes on in the next few lines of code
// starting with new position variables and working outwards:
// these two variables are in the range of 0 to 255 so lets map it to a new range.
// the new range is from 0 to whatever the caliration set as the max position.
// the calibration set the max position in EEPROM in the last two addresses.
// once the mapping is complete, we read the current encoder data and use that as the address
// to look up what the current position is.
// to make sure we are working with good values, lets contrain this position values that are
// between 0 and the max position as read from the last two addresses in EEPROM.
// subtract our mapped int from the current position to get our offset.
// multiply this offset by 10 so that the servo speed will be quick.
// constrain maximum servo speed to +/-30.
// add 90 because that is the "stop" speed.
// write to the servo.
byte len = EEPROM[EEPROM.length() - 1] - 2; // stay 2 positions away from edge
byte currentPos = EEPROM[highByte(read74HC165())];
if (currentPos != 255) { // check for out of bounds value (255) prior to updating servo
servo1.write(
constrain(
(
currentPos
- map(
servo_1_pos, 0, 255, 2, len // stay 2 positions away from edge
)
) * 10 , -30, 30
) + 90
);
} else {
return false; // hit out of bounds
}
len = EEPROM[EEPROM.length() - 2] - 2;
currentPos = EEPROM[lowByte(read74HC165())];
if (currentPos != 255) {
servo2.write(
constrain(
(
currentPos
- map(
servo_2_pos, 0, 255, 2, len
)
) * 10 , -30, 30
) + 90
);
} else {
return false;
}
return true;
}
//======================================================================
// Reads two bytes from the 74HC165 registers
unsigned int read74HC165()
{
digitalWrite (LOAD_DATA, LOW); //load the push button state into the 74HC165
asm("nop\n nop\n"); //some delay
digitalWrite (LOAD_DATA, HIGH);
digitalWrite (CLK_INH, LOW); //enable 74HC165 clock
asm("nop\n nop\n"); //some delay
unsigned int Switches = SPI.transfer16(0); //get the position
digitalWrite (CLK_INH, HIGH); //disable 74HC165 clock
return Switches; //switches will have the value read by then 74HC165
}
// END of read74HC165()
//======================================================================
void calibrateEncoders() {
for (int i = 0 ; i < EEPROM.length() ; i++) {
EEPROM.write(i, 255);
}
while (!digitalRead(CAL_BTN)) {}
Serial.println("Starting Clibration of number 1.");
Serial.println("Press button when reaching start point.");
delay(2000);
servo1.write(100);
while (digitalRead(CAL_BTN)) {}
servo1.write(90);
Serial.println("end position noted");
byte encoder_1 = highByte(read74HC165());
byte encoder_2 = encoder_1;
int pos = 0;
delay(2000);
Serial.println("Other direction");
delay(1000);
servo1.write(80);
while (digitalRead(CAL_BTN)) {
int tester = countSetBits(encoder_1 ^ encoder_2);
if (tester > 1) {
Serial.println(tester);
}
if ((tester == 1) && (EEPROM[encoder_1] != EEPROM[encoder_2])) {
//Serial.println(encoder_1, BIN);
//Serial.println(pos);
servo1.write(90);
delay(5);
EEPROM[ encoder_1 ] = pos;
encoder_2 = encoder_1;
pos++;
delay(5);
servo1.write(80);
}
encoder_1 = highByte(read74HC165());
}
servo1.write(90);
EEPROM[ EEPROM.length() - 1 ] = --pos;
while (!digitalRead(CAL_BTN)) {}
Serial.println("Starting Clibration of number 2.");
Serial.println("Press button when reaching start point.");
delay(2000);
servo2.write(100);
while (digitalRead(CAL_BTN)) {}
servo2.write(90);
Serial.println("end position noted");
encoder_1 = lowByte(read74HC165());
encoder_2 = encoder_1;
pos = 0;
delay(2000);
Serial.println("Other direction");
delay(1000);
servo2.write(80);
while (digitalRead(CAL_BTN)) {
int tester = countSetBits(encoder_1 ^ encoder_2);
if (tester > 1) {
Serial.println(tester);
}
if ((tester == 1) && (EEPROM[encoder_1 + 512] != EEPROM[encoder_2 + 512])) {
//Serial.println(encoder_1, BIN);
//Serial.println(pos);
servo2.write(90);
delay(5);
EEPROM[ encoder_1 + 512 ] = pos;
encoder_2 = encoder_1;
pos++;
delay(5);
servo2.write(80);
}
encoder_1 = lowByte(read74HC165());
}
servo2.write(90);
EEPROM[ EEPROM.length() - 2 ] = --pos;
Serial.println("test");
time = millis();
while ((millis() - time) < 10000) {
updateServos(1, 1);
}
Serial.println("test1");
time = millis();
while ((millis() - time) < 10000) {
updateServos(254, 254);
}
Serial.println("test2");
delay(1000);
}
unsigned int countSetBits(int n)
{
unsigned int count = 0;
while (n)
{
n &= (n - 1) ;
count++;
}
return count;
}Schematics for this little gizmo can be found here :
https://easyeda.com/andrewmcdan/encoder-servo-controller (This board has the Arduino on it.)
https://easyeda.com/andrewmcdan/Encoder-Breakout
https://easyeda.com/andrewmcdan/encoder-servo-controller-2 (This board has the relays on it.)
More updates to come!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.