 Peter Wasilewski
Peter WasilewskiHackaday says it should be a detailed description so I'll do my best to hand You as many details as I can.
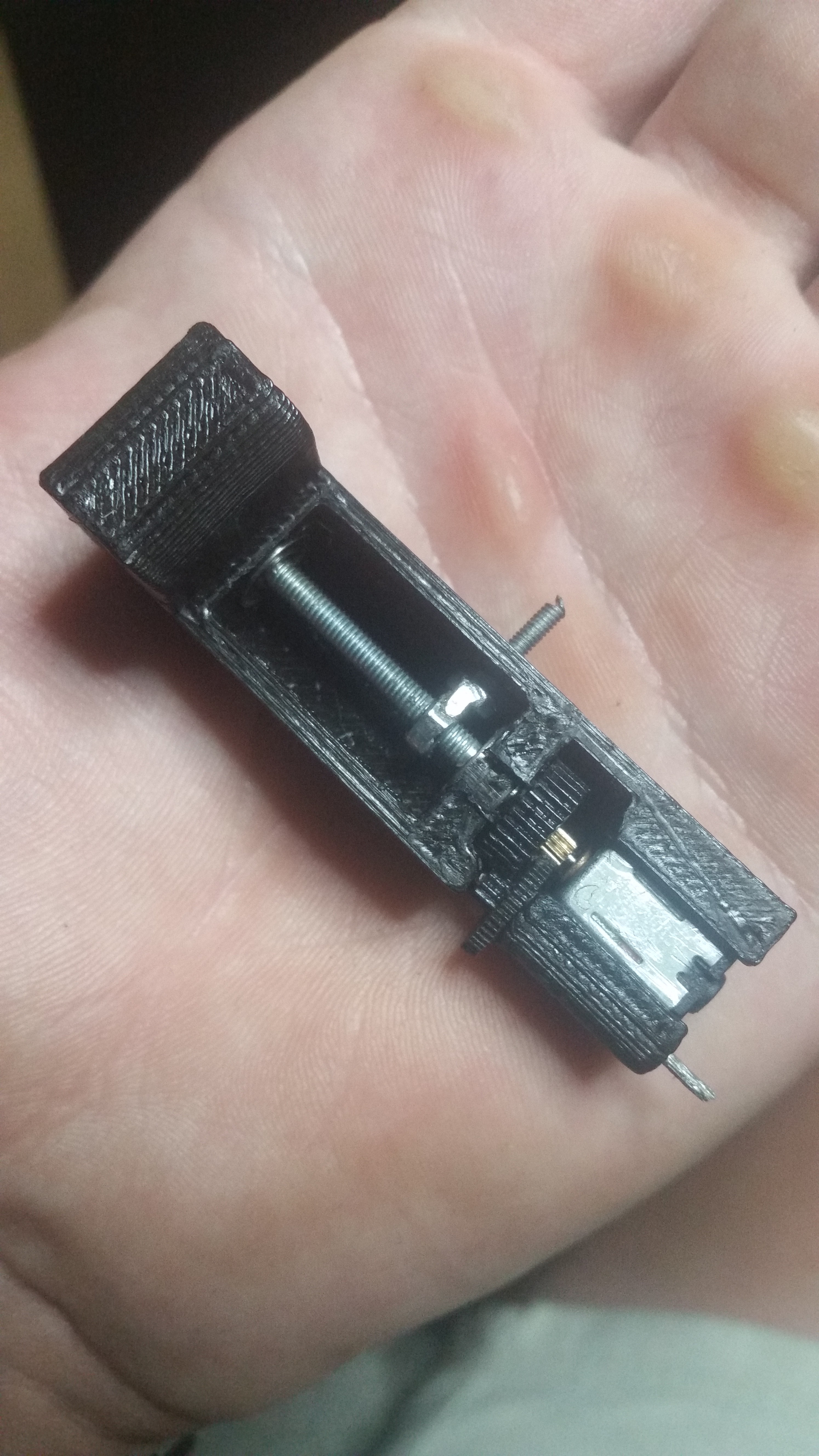
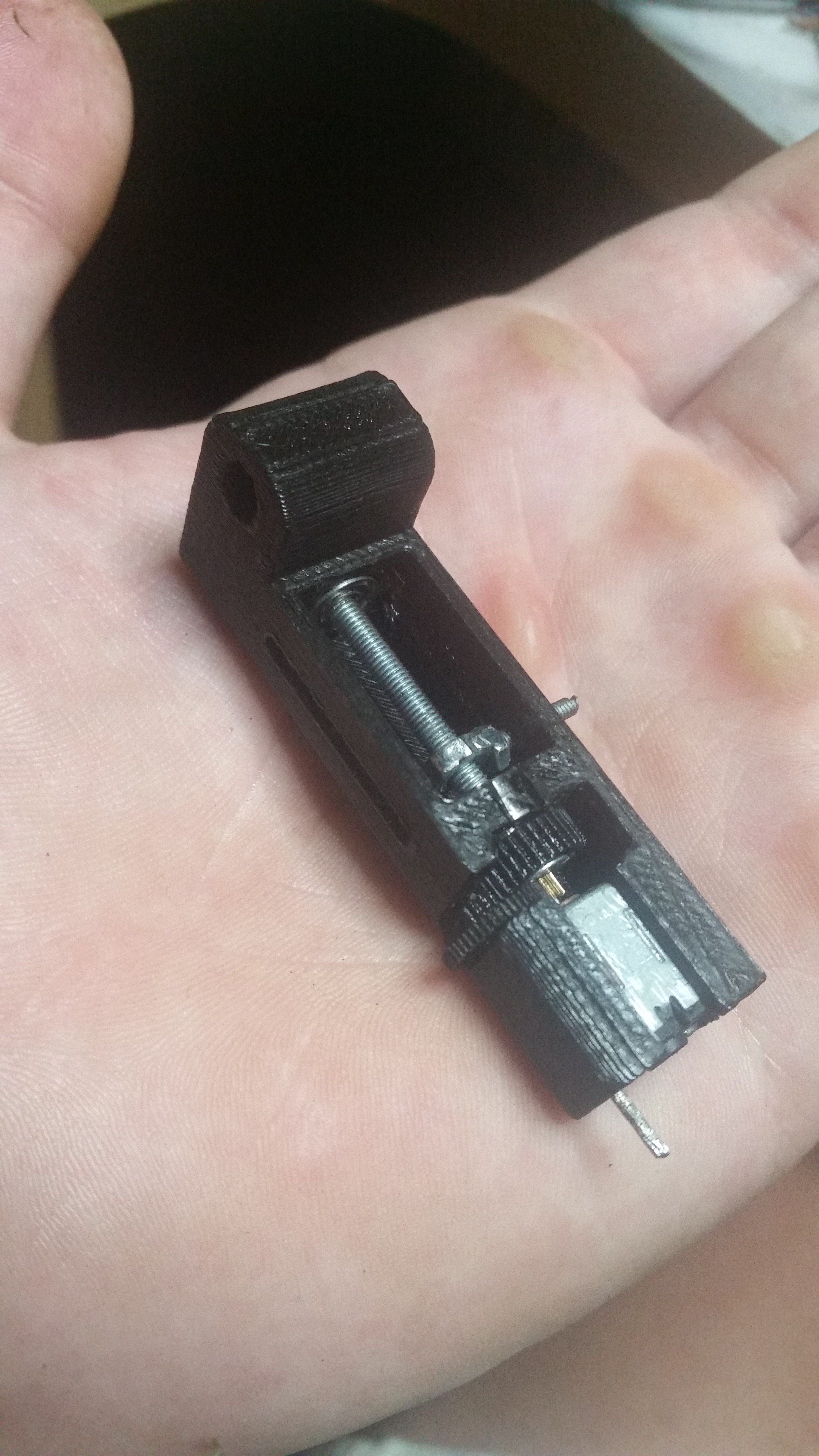
You can see on the photograp it has 8 servomotors. Four, bigger, are the thigh motors and the other four are moving the calf. I decided to put them on the body, not in the knee, to make te legs lighter and therefore faster. The knee is controled using metal rod, as well as the foot, which is conntected to the thigh. I'm still thinking of placing a touch sensor on the end of the leg, but I have to figure out how to do that.
The electronics controling current version is really simple - it has a DC-DC converter (for servos), an 3.3 LDO regulator for the stm32. Actually this is only the board for the power supply and servo control. The main board is not made yet. I'm still thinking of soldering an extra cable to each servo to the potentiometer to be able to read the position.
Regarding software - the servos are controled by software, using an systick interrupt. To move it uses a really simple inverse kinematics ( this is my first experience with legged robots). Currently the below "walk" is created using 4 "for" loops. I guess that's not the solution that MIT or BD uses, but for now it look quite good ;)
Peter.




 Morning.Star
Morning.Star
 The Big One
The Big One
 Timescale
Timescale
I see you added more details now. That's great. I also struggled with touch sensors for my robots -- custom force sensors were too complex to make, simple endstop switches took too much force to switch (my robot is light). Then I discovered the "detector switches", which are usually used to see if an SD card is inserted. They require very little force, have small travel, and come in SMD versions that are very easy to attach to the end of a foot.
As for position sensing on servos, you might be interested in this log: https://hackaday.io/project/6050-tote/log/18992-proprioception-on-the-cheap