TBA
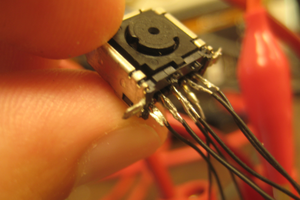
Ultra low light(0.00001 Lux) analog camera was used with EasyCAP UTV007 USB video converter to bring video in RaspberryPi. Video signal amplifier was also used. More information can be retrieved from the block-scheme.
Using PIC in upper part of underwater module is redundant, but needed because in a rotation joint was used only 6 wire slip ring leaving only one wire(vin, gnd, video, rxd, txd) to control stepper motor. This was a mistake and caused a few more problems.
Camera's relative sight direction can be identified by two compasses - one underwater and one in the ground module. Gyroscope was also used with compass underwater to act as one 3-axis IMU module using this firmware https://github.com/TKJElectronics/Example-Sketch-for-IMU-including-Kalman-filter
Camera can be controlled by mouse or touch gestures. Hammer.js lib was used for this.
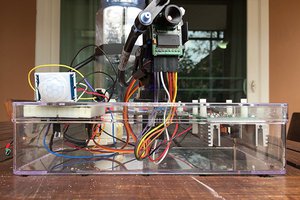
Powered by 4x18650 or any 5-30V adapter. Current is ~1.2A total with two connected clients. Underwater module alone: 150mA(250mA while rotating). High current consumption can be explained by redundant amount of DC-DC converters, overclocked RPi and WiFi adapter in an access point mode, which heats like an oven.
Some code can be found here https://github.com/iam-black/uwcamera

 vedanshi.shah
vedanshi.shah
 Eric Jacob
Eric Jacob