 jellmeister
jellmeisterI'm nearing a week in and so far I have made...
...a plan!
For me to complete the design and build the electric sheep of my (and androids') dreams in the competition timescales I need to bite off the right challenges early.
I have broken the proposed system into manageable chunks:
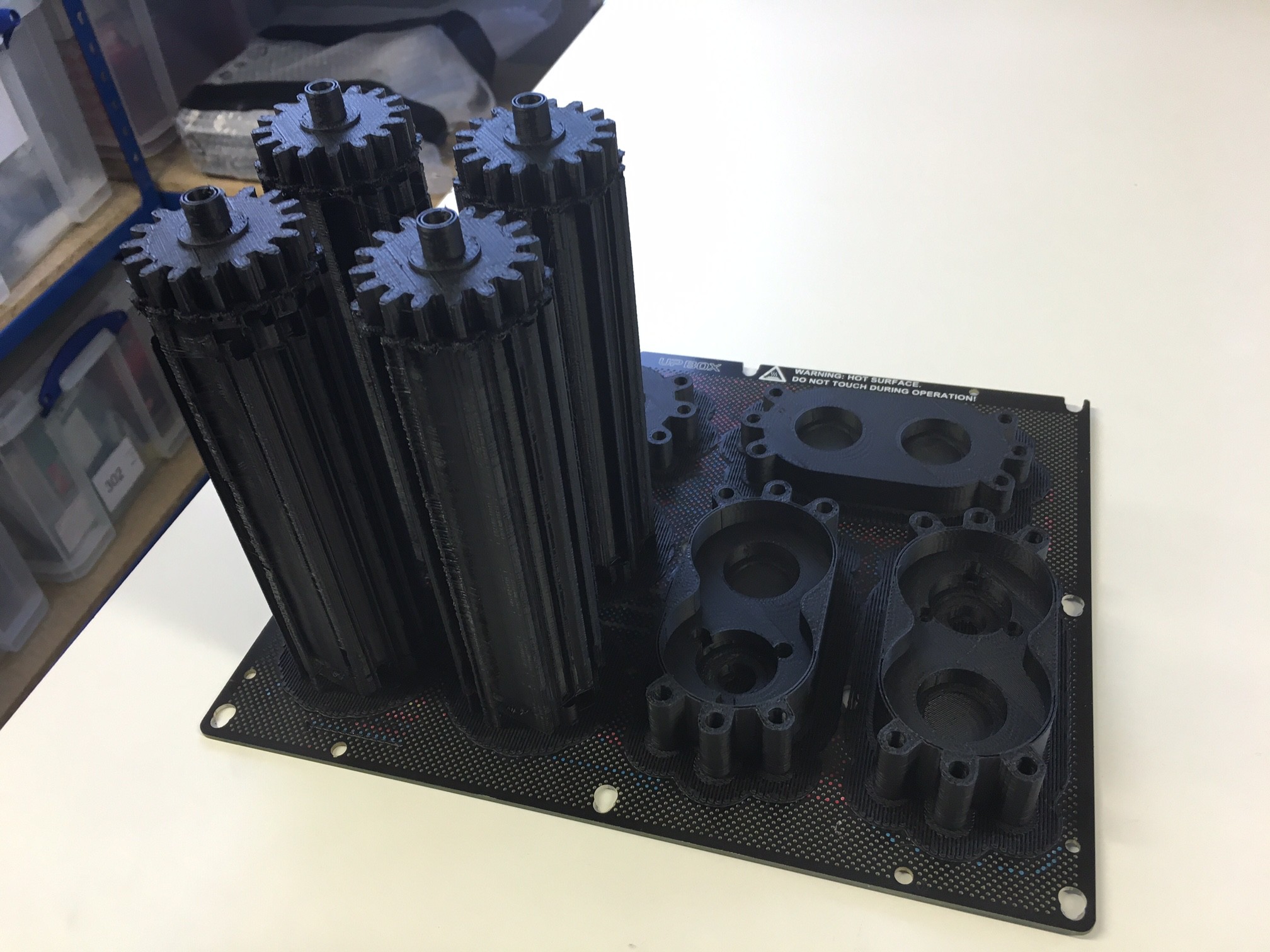
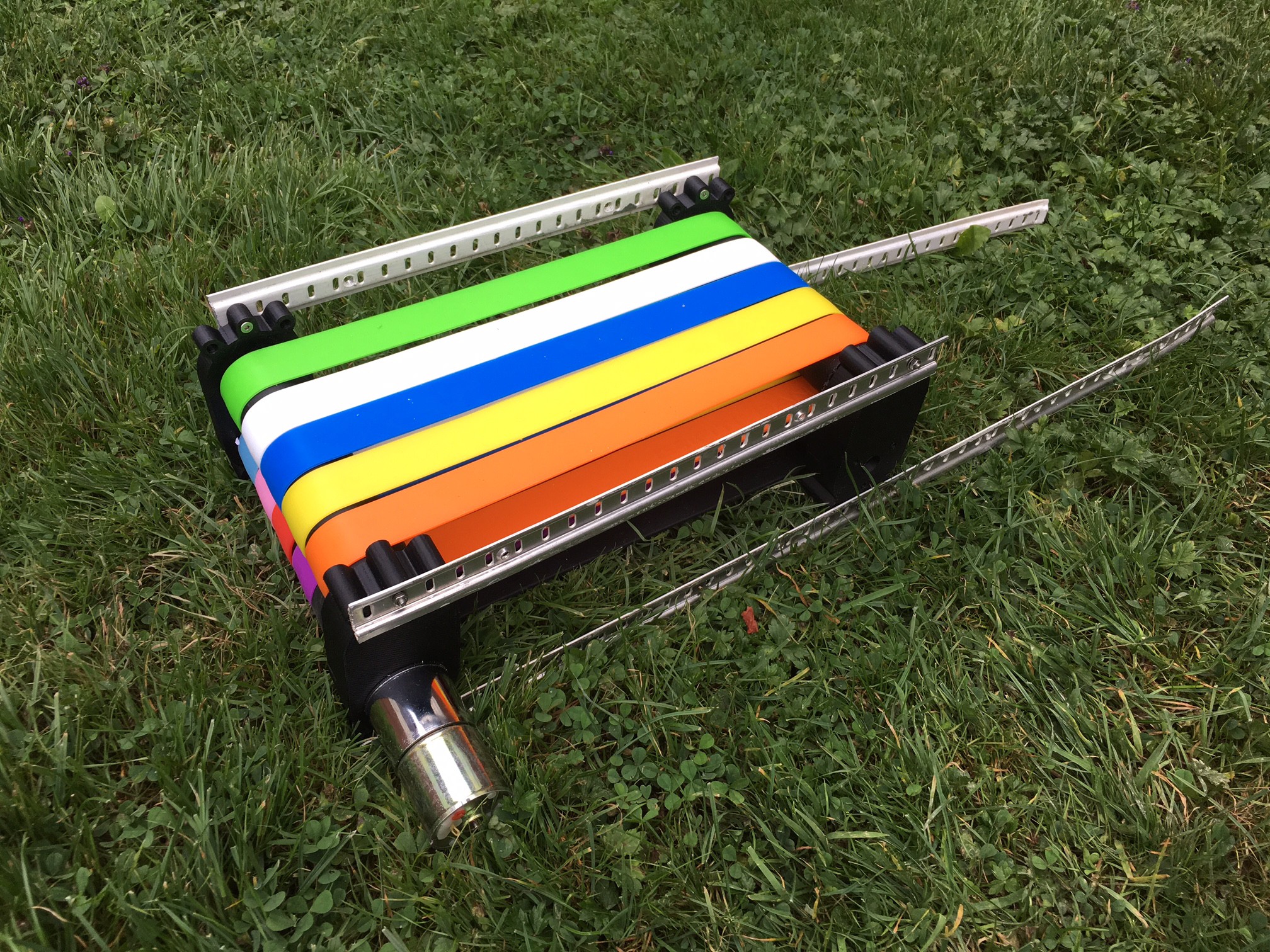
- The 'Munching engine'. This is the business end that needs to slowly, efficiently and safely eat the grass.
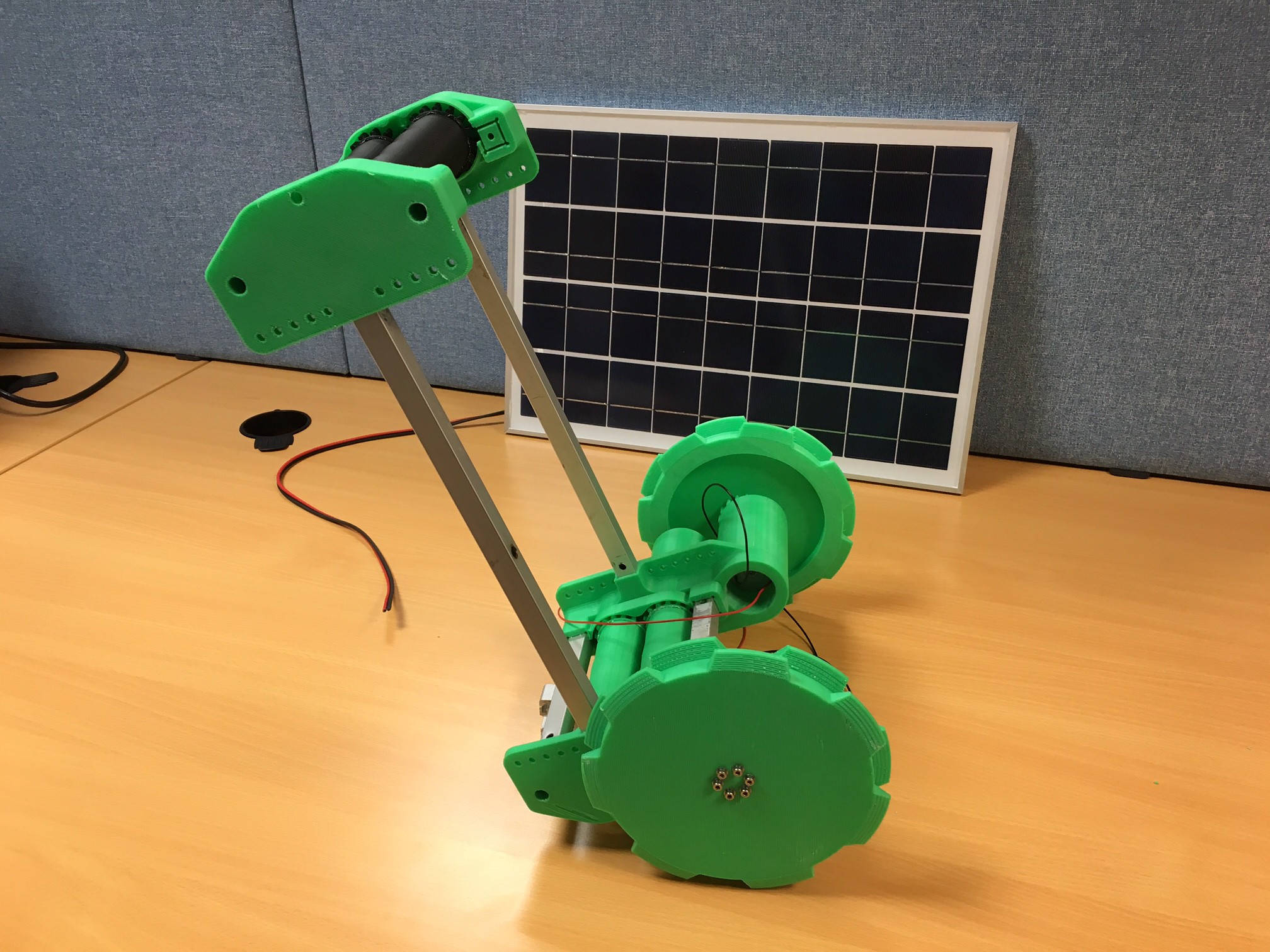
- Locomotion. Not the Kylie track, this is all about letting the sheep move as well as controlling its motion.
- Decision engine. Sheep aren't renowned for their intelligence, but this one will need to decide where to go to graze or to charge and when to do each.
Lets start with the 'Munching engine'
I have a 5 phase plan:
- Concepts. Identify possible approaches to mechanical grazing.
- Proof of principle. Test one or more approaches against real grass.
- Low power. Upgrade 'Munching engine' to efficiently run on low power.
- Self clean. Upgrade the design to avoid gunking up over time.
- Grass processing. Work out how to handle the grazed grass.
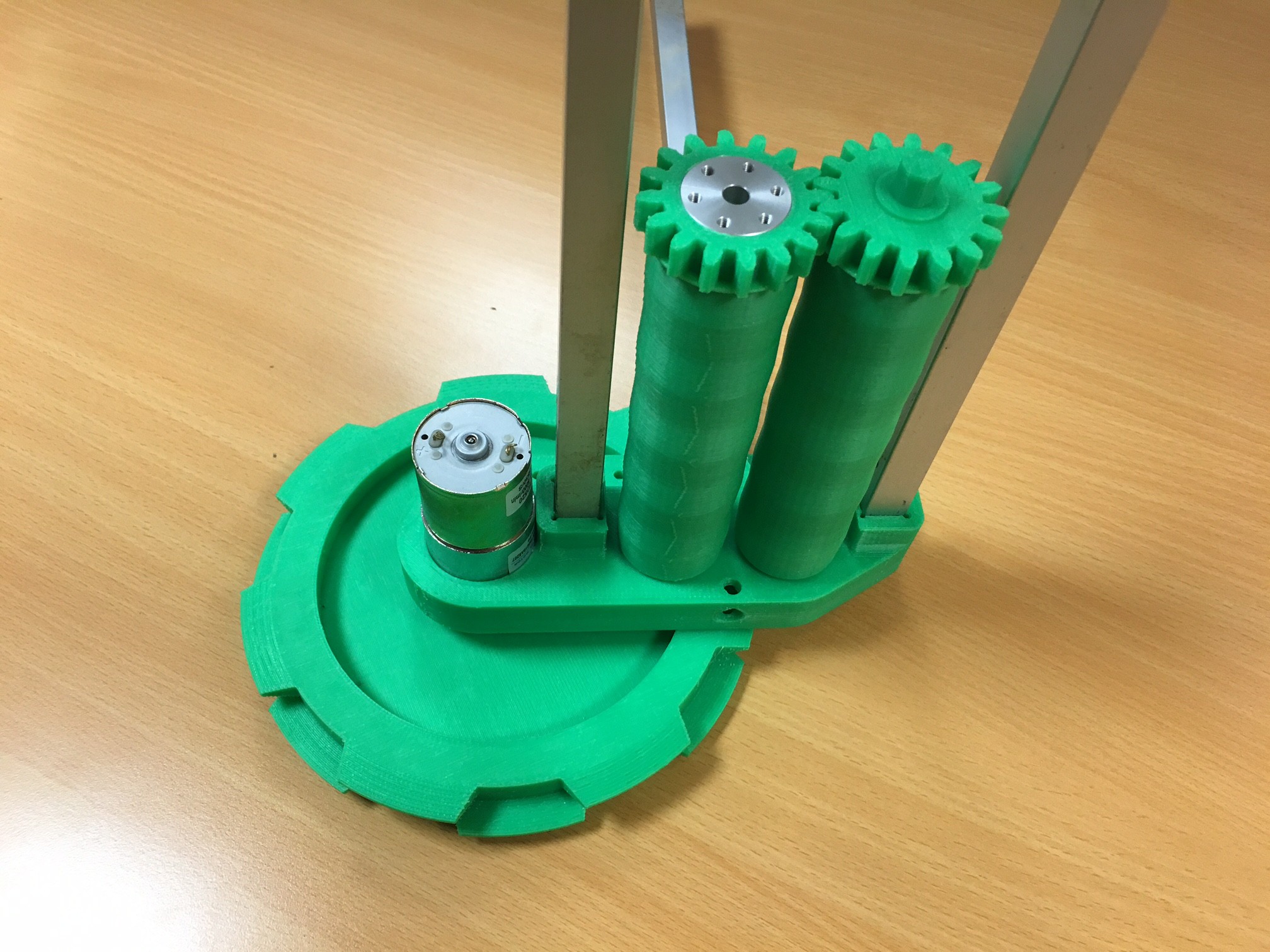
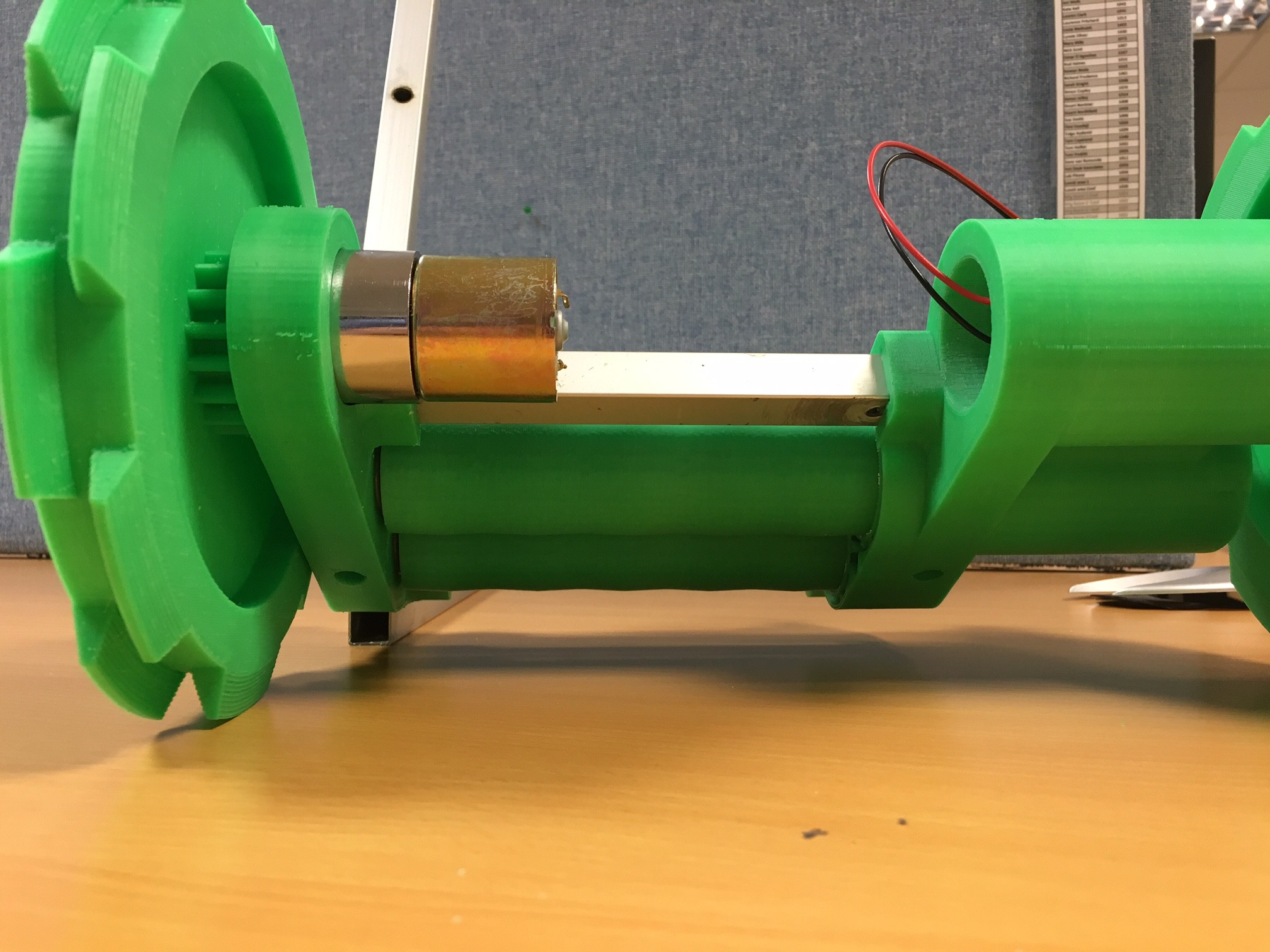
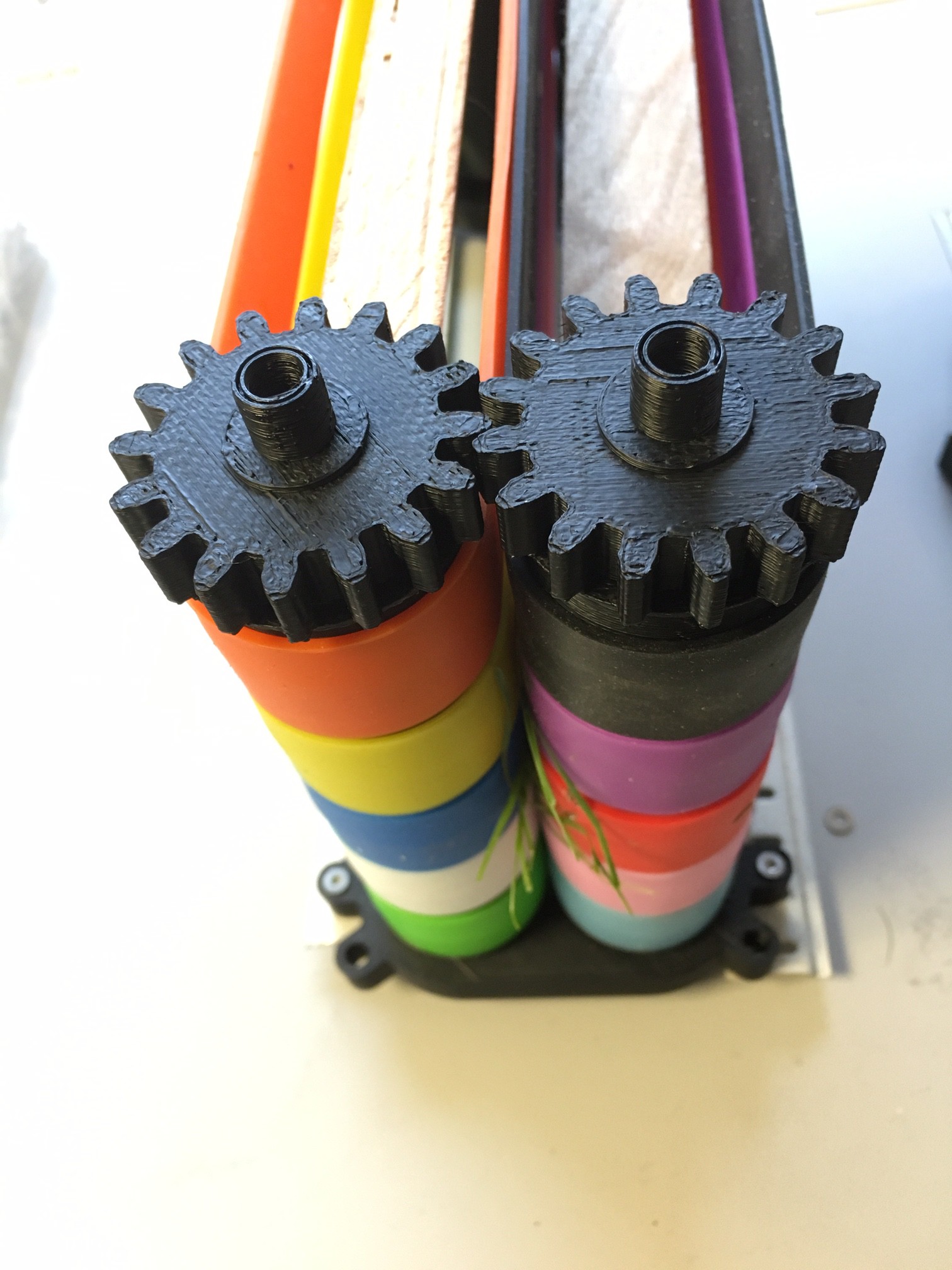
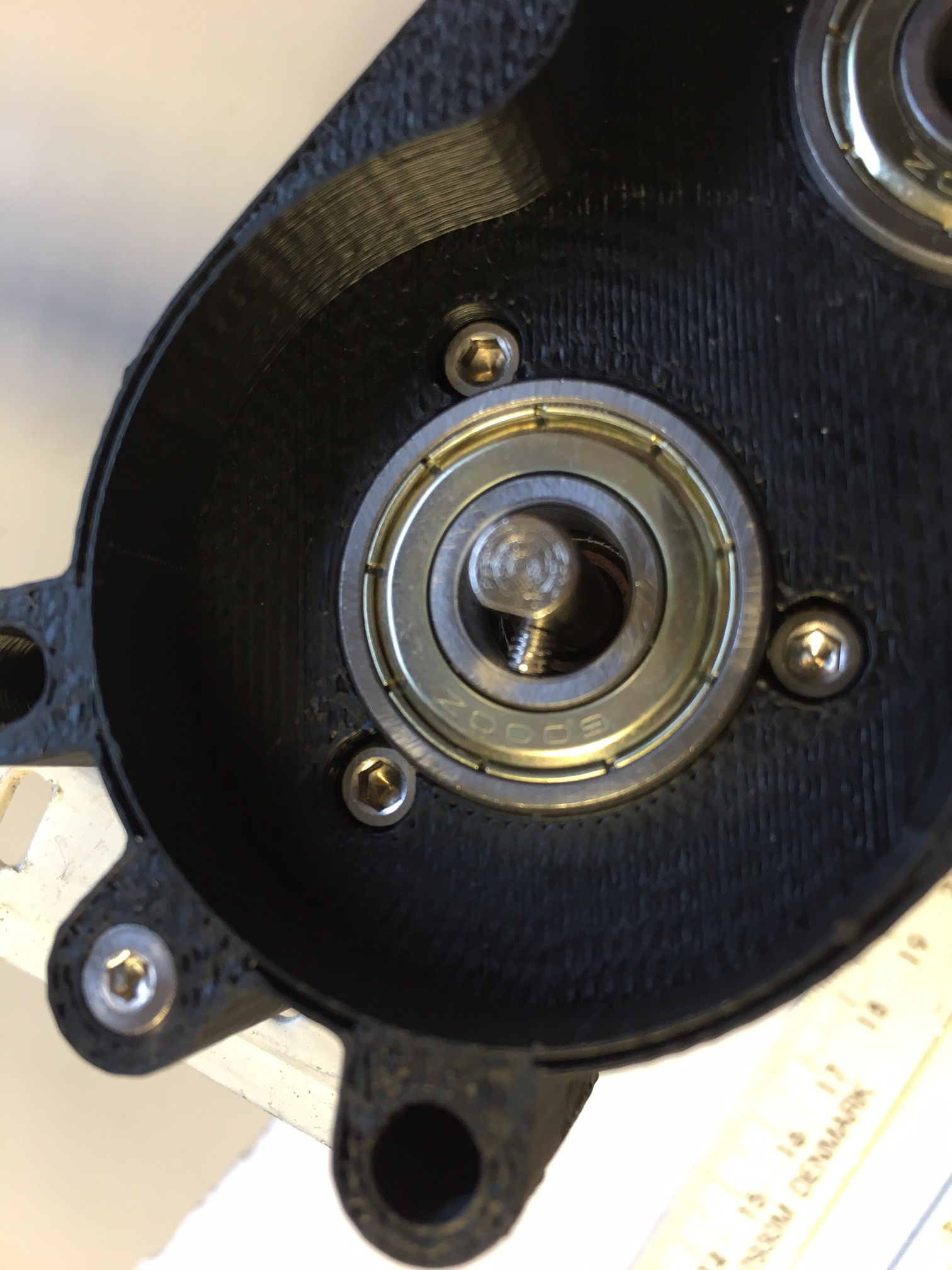
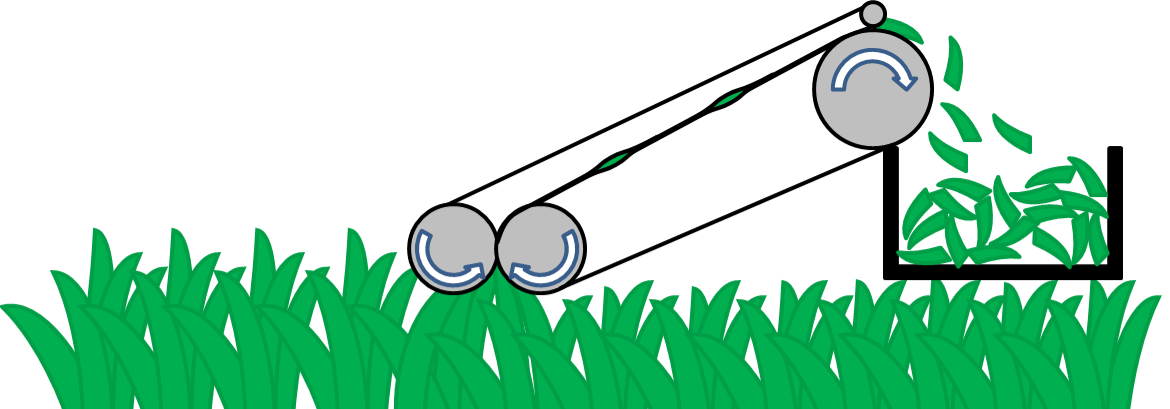
I'm currently working on concepts. Currently I have two thoughts on this. The most sheepy would be a wire-stripper-like mechanism where the front jaws grip the grass blade low down, and the sliding blade part grips and pulls the top of the blade off. The second thought I have is simpler; two silicone belts running between pinch rollers that grip the blades of grass, tear them off and then carry them away. This may pluck the grass blade at its base rather than at the cut height, which could be a problem, but the simplicity is very attractive and the cut grass can be collected easily rather than needing intervention to avoid scattering it on the lawn.
Any other thoughts, let me know in comments.
Until next time,
Jellmeister







 DrYerzinia
DrYerzinia
 Quinn
Quinn
 kmatch98
kmatch98
Love this !!! Have wanted one for myself. My thoughts are no battery ( mow only during the day and no charger). I would not need to collect clippings so cut with a pair of scissors. Bot would collect solar ( perhaps like a joule thief circuit), then lunge forward an inch or two as the scissors close. Repeat. Perhaps no rotary motion involved at all, one solenoid could lunge and snip. Actuator could be weak enough so it was unable to snip a finger. Lunge would slightly rotate one wheel or the other depending on the navigation system. Perhaps feel or look for grass, also thought of creating a perimeter by sinking nails at intervals and have a compass ( or something ) look for them. Hope no computer at all and about the size of a toaster. Thanks for your great inspiration!!