 ronald.sutherland
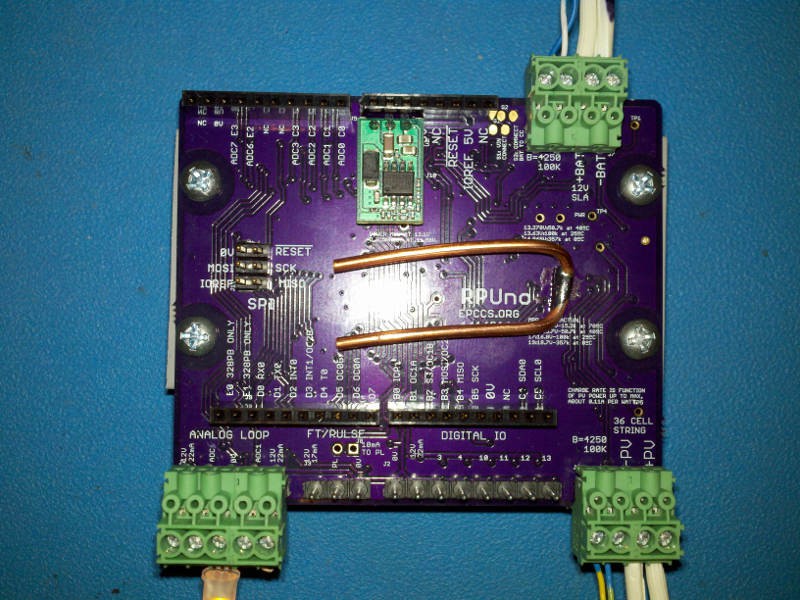
ronald.sutherlandThe bare metal microcontroller on this board is the same as an Arduino Uno. I use it to evaluate the examples Arduino has. Normally C is my preference so converting Arduino's C++ into C adds some overhead, the toolchain supports both but C causes fewer surprises since it is implemented with a stack-based memory system (C++ needs the heap for its features). The toolchain is available on most Linux distributions, a Raspberry Pi makes a nice remote computer and can handle networking services robustly. Logging into the remote computer is done with SSH and updates for the controller are done by pulling from GitHub and then using make to run the "Makefile" rules that compile and upload firmware over a serial link. Mezzanine boards RPUadpt and RPUpi can be used to add multidrop serial. The mezzanine VIN pin can be disconnected with an onboard P-channel MOSFET to remove power from the Raspberry Pi computer.
0%
0%
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests


 Kris Winer
Kris Winer
 alnwlsn
alnwlsn
 M. Bindhammer
M. Bindhammer
 Mike Cochrane
Mike Cochrane