 Michael Roybal
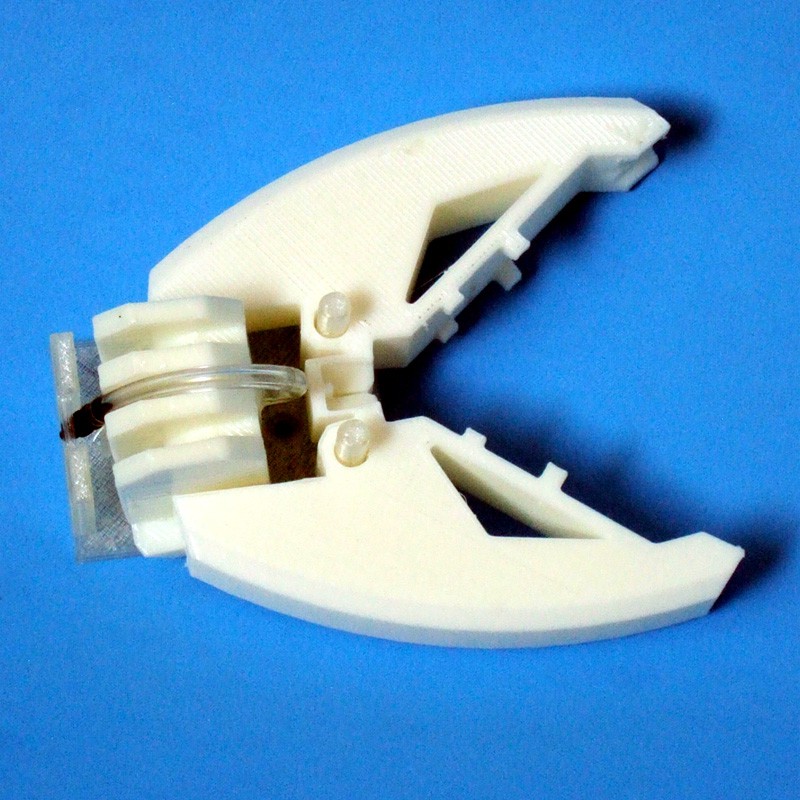
Michael Roybal The two arms can be used to pick up objects and move them to the person controlling it. It can be used to provide medicine, food and water or manipulate a phone, tablet, or other device. The voice circuit can be used to facilitate communication for those with limited or no speech. The face is basically an emoticon that can be used to display emotions.
The two arms can be used to pick up objects and move them to the person controlling it. It can be used to provide medicine, food and water or manipulate a phone, tablet, or other device. The voice circuit can be used to facilitate communication for those with limited or no speech. The face is basically an emoticon that can be used to display emotions.
Zizzy the robot, can be remote controlled using infrared signals from a standard universal remote control. An infrared remote control could easily be modified to interface with a wheel chair, puff and blow, or other type of controller. This would allow the operator to remote control all motions or to activate pre-programmed sequences.
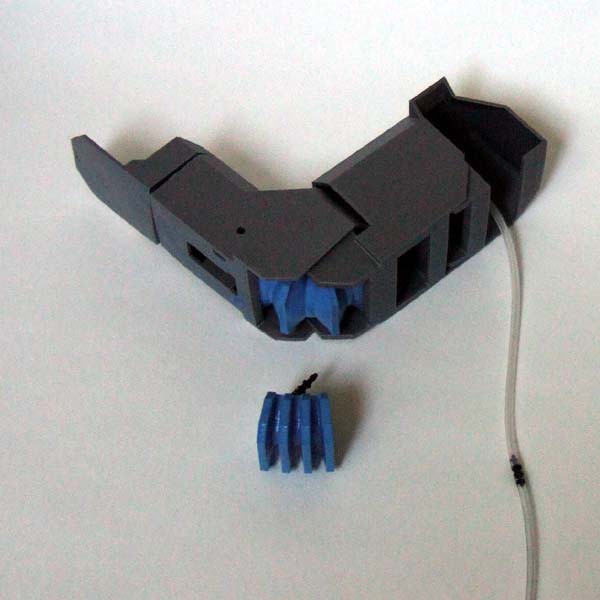
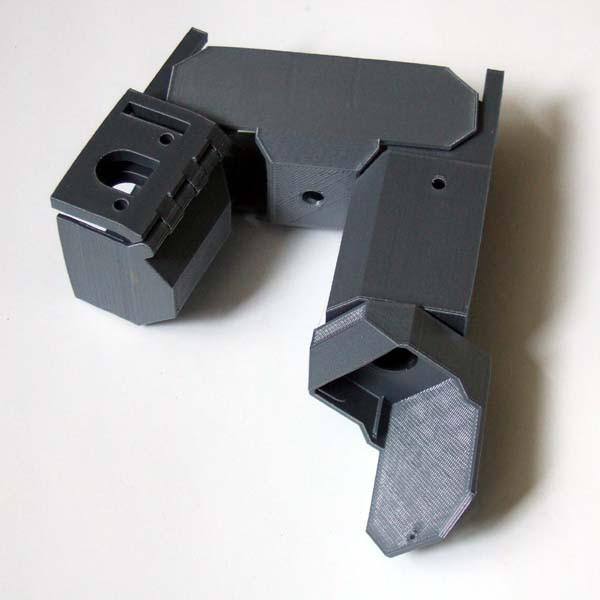
Project detail picture shows the new arms and grippers installed.
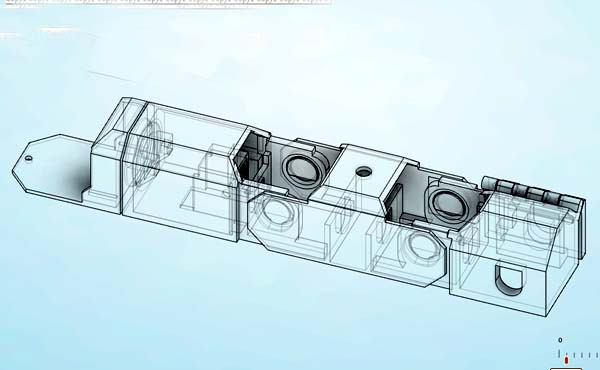
Modular Construction
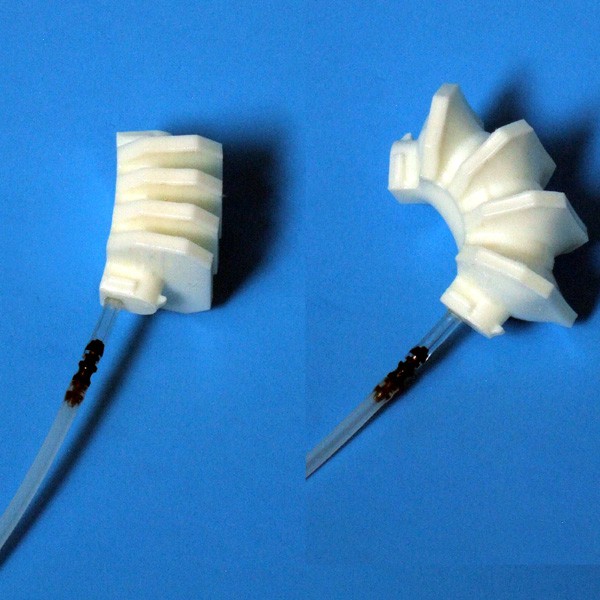
This robot uses modular construction with the muscles and grippers able to plug in and out to allow for easy replacement or upgrades whenever a better design becomes available. The talking circuit and master robot neuron also plug in and out to allow for upgrades.
The Future Of Robotics
I believe the future of practical and affordable robot assistants will involve soft artificial muscles such as those used here. They are lighter and less expensive than the standard gear motors and power servos used by most present day robots. They are also less dangerous around humans as they have a certain amount of built in give if they push against a human. While some gear motors and servos will still be necessary, many can ultimately be replaced with air powered artificial muscles. While there are many experimental artificial muscles in the works, air powered artificial muscles are the only practical muscles available today for small robots.
While much is made about the purely soft robots that have little or no bone structure, my previous soft robot experiments have shown that a fairly stiff skeleton with hinge joints is neccessary with soft robot artificial muscles to get precise movements that are easily repeatable.






 Thane Hunt
Thane Hunt
 BTom
BTom
 Volttherobot
Volttherobot
 Diego Balarezo
Diego Balarezo
I believe the air pump you need is a vane pump style. I was going to whip one up and test it out, but then found that they exist...
https://www.alibaba.com/product-detail/rotary-vane-pump-mini-air-pump_627943954.html?spm=a2700.7724857.0.0.XOcEse
I may make one anyway because I need a small air ram for one part of my project. If there is any interest, let me know, i`ll document it. I am basing my knowledge on the internals of a vacuum pump and a diesel injection pump.