 Andrew Becker
Andrew BeckerSo I've been working on the layout for the arm to ensure that I will be able to expand it to 6-axis eventually and I've been adding a whole lot of detail as I said in the previous post. You can see below the 'wrist' joint before arm 2 as well as the addition of most of the bolts, nuts and bearings. This will make a full B.O.M. easy to produce.
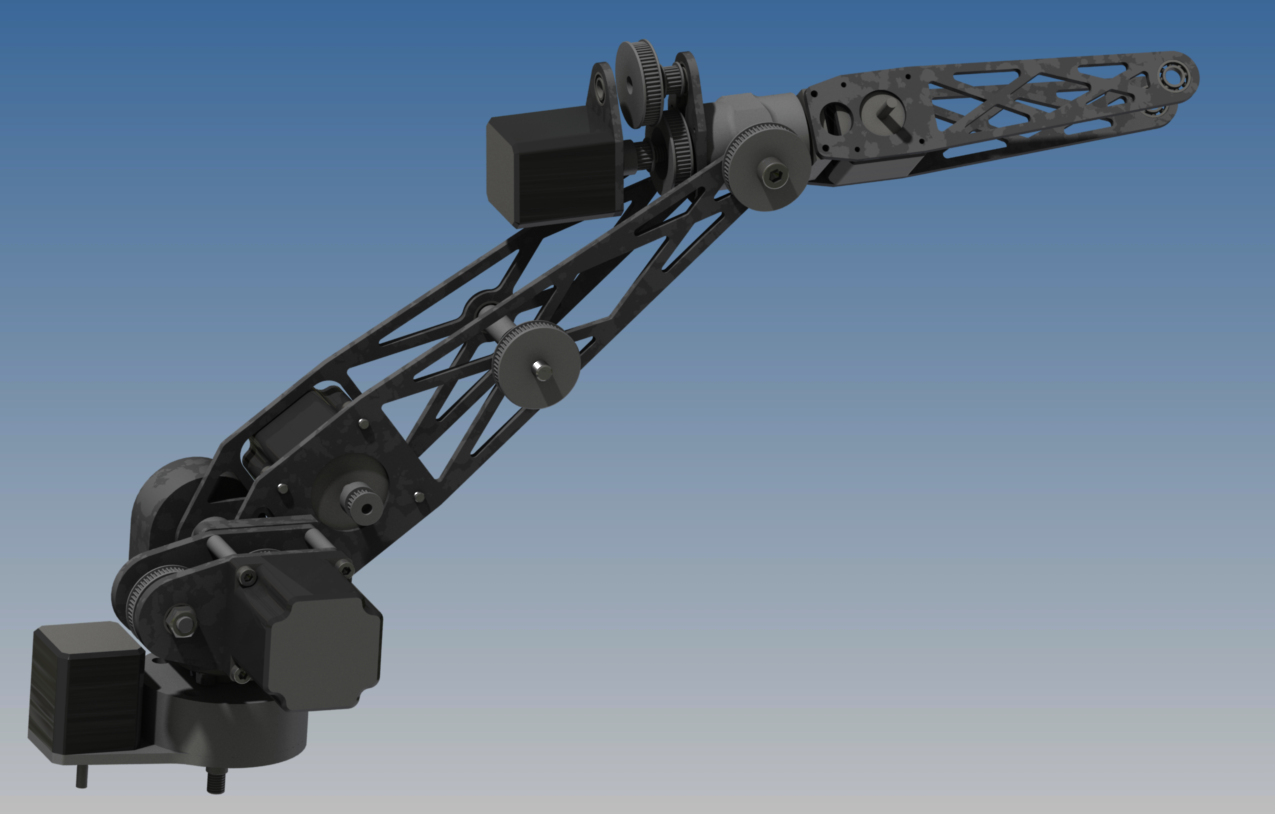
The pulley gearboxes are less than ideal however the design has been done so that I can swap in high precision planetary gearboxes at a later stage. These cost around $250 a piece so they will be the last items to buy if the budget allows. They should be lighter than all of the pulley gearbox components with less backlash.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.