0%
0%
Replicator K
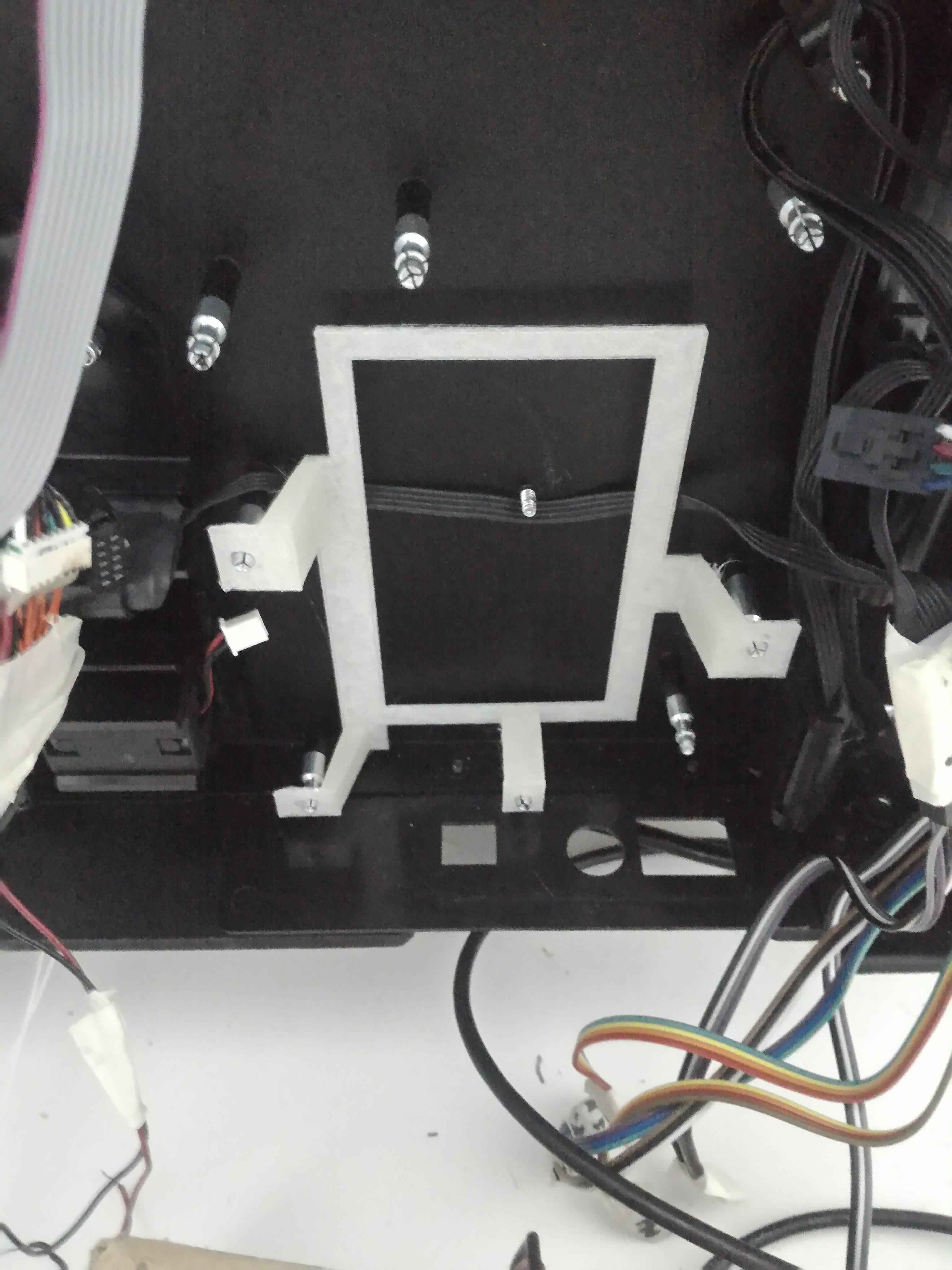
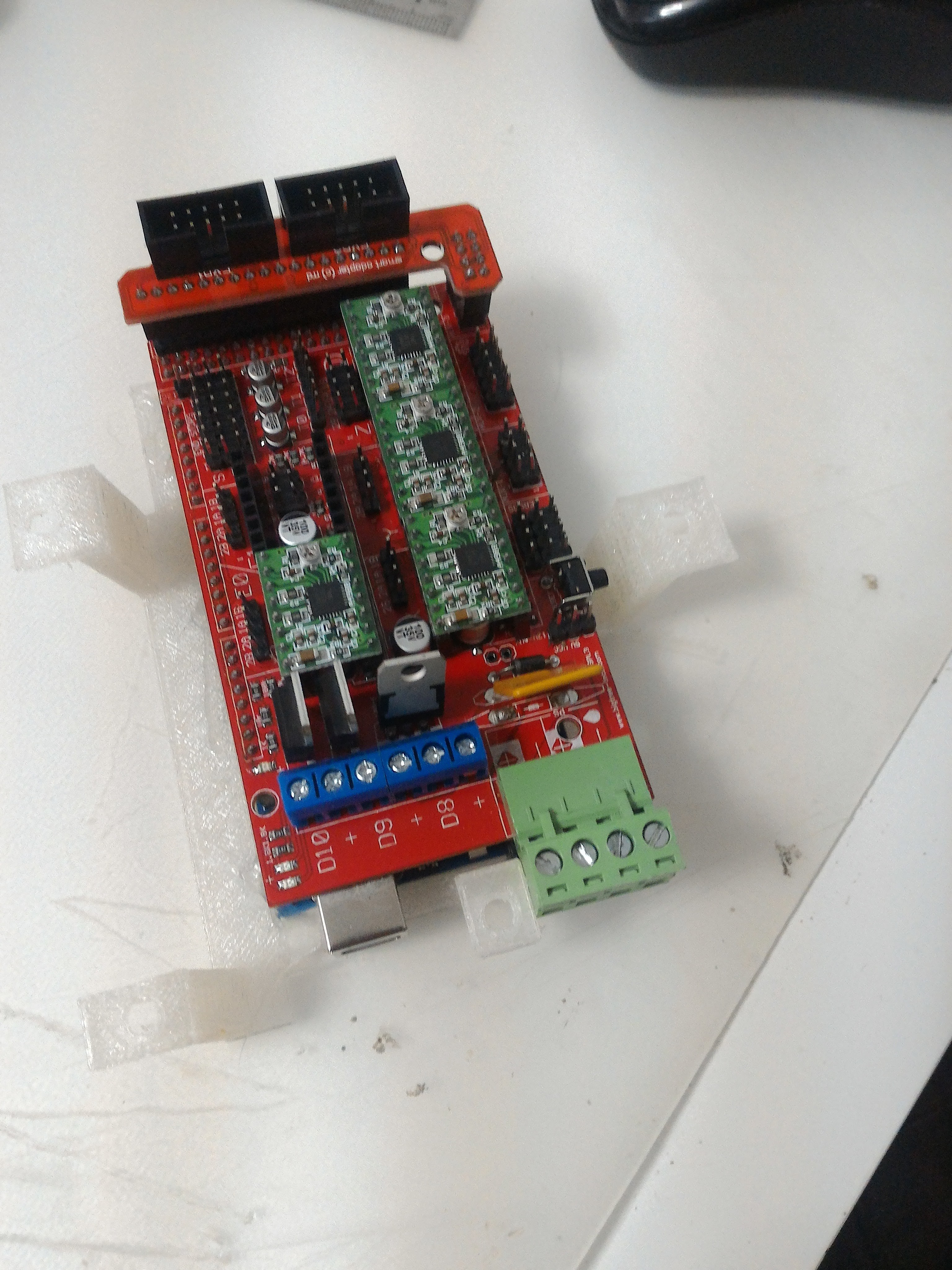
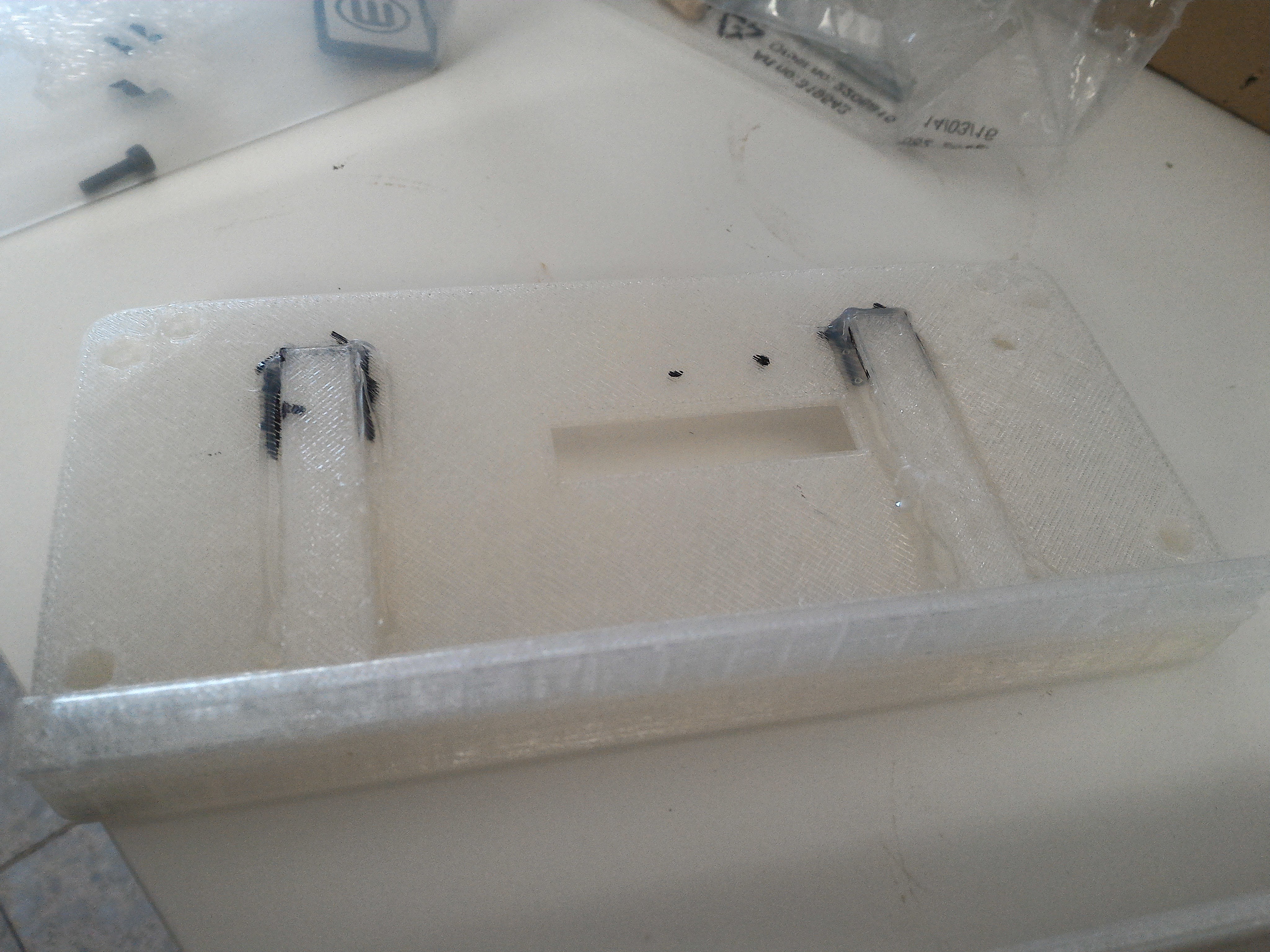
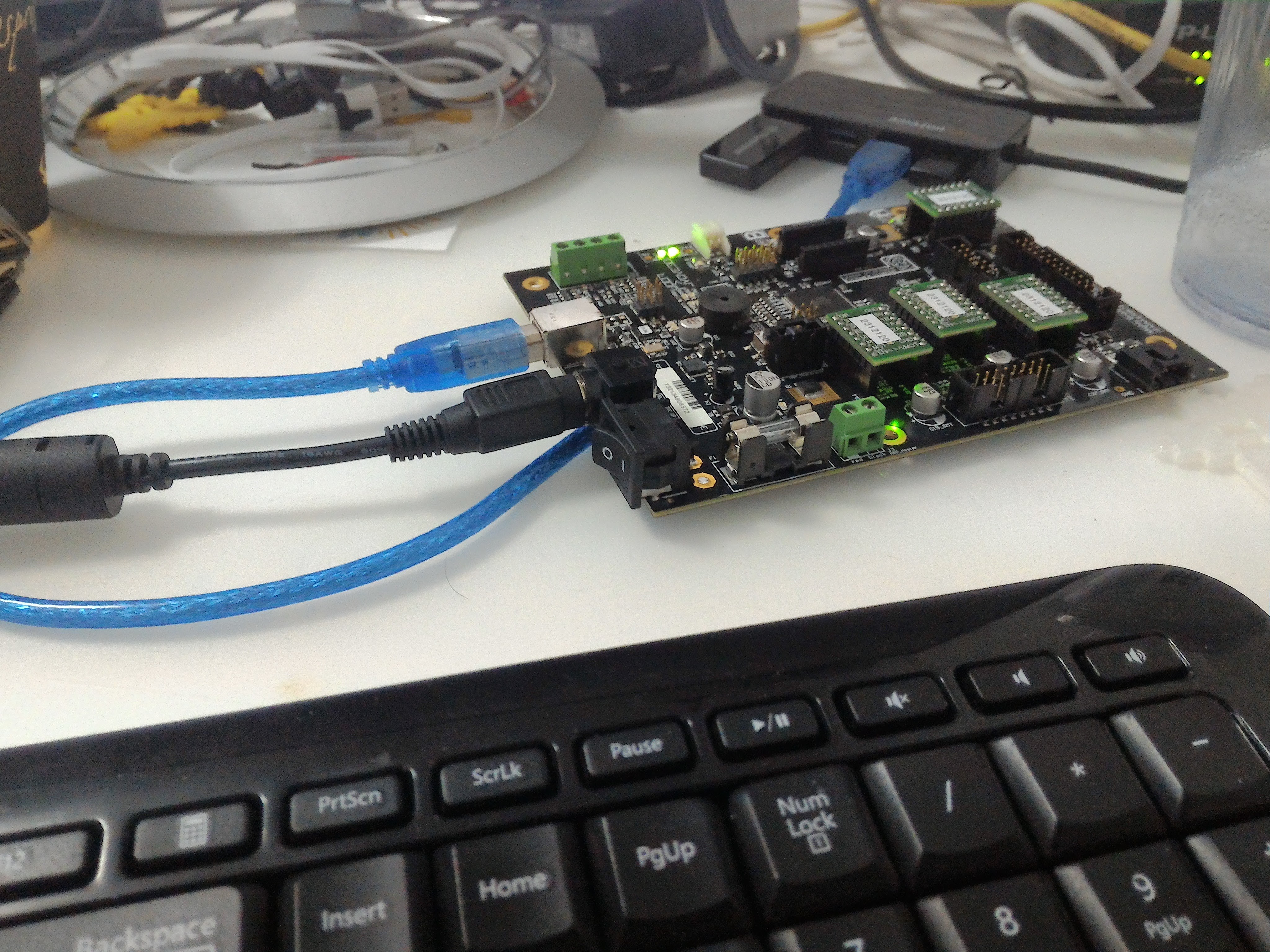
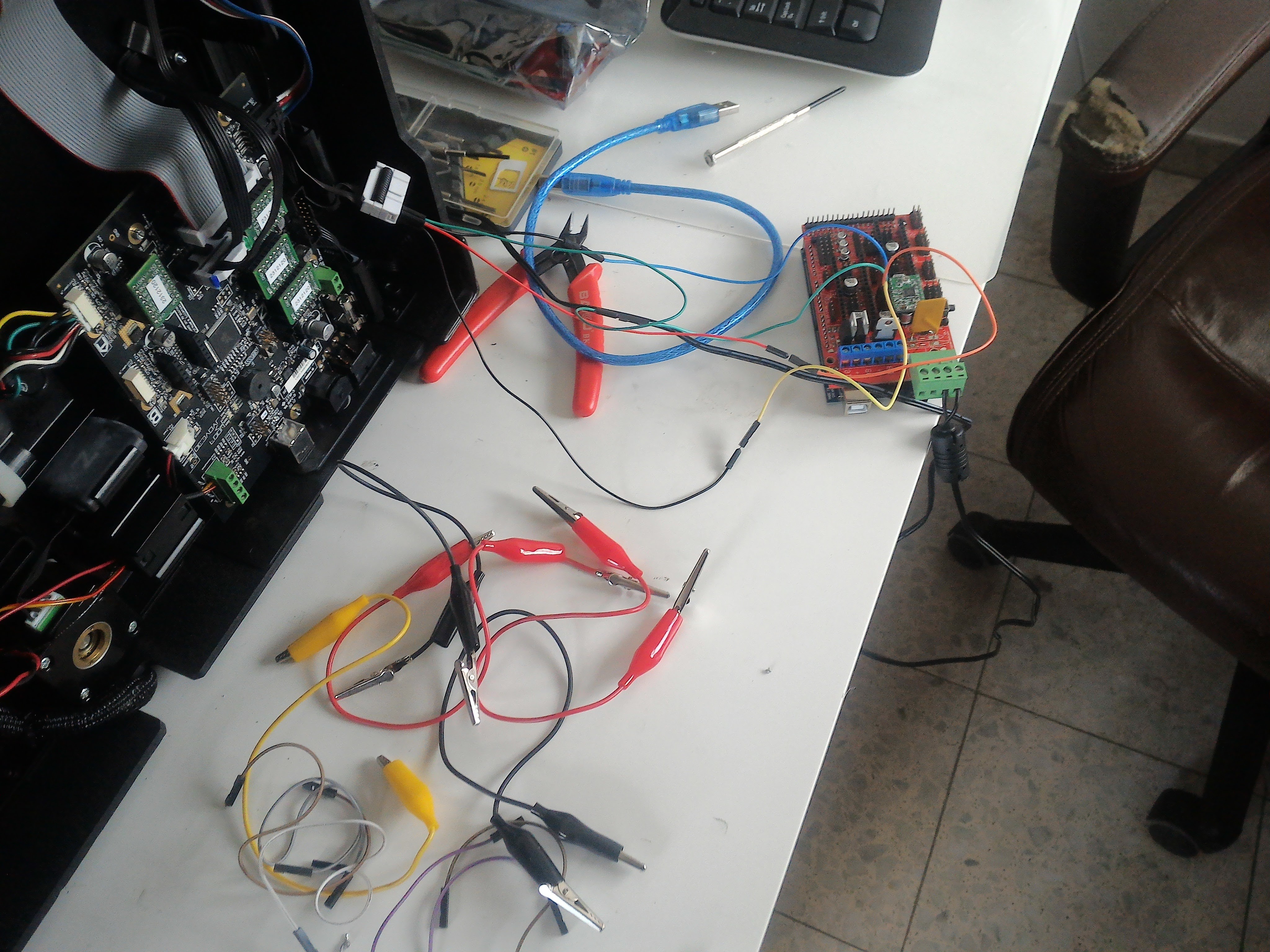
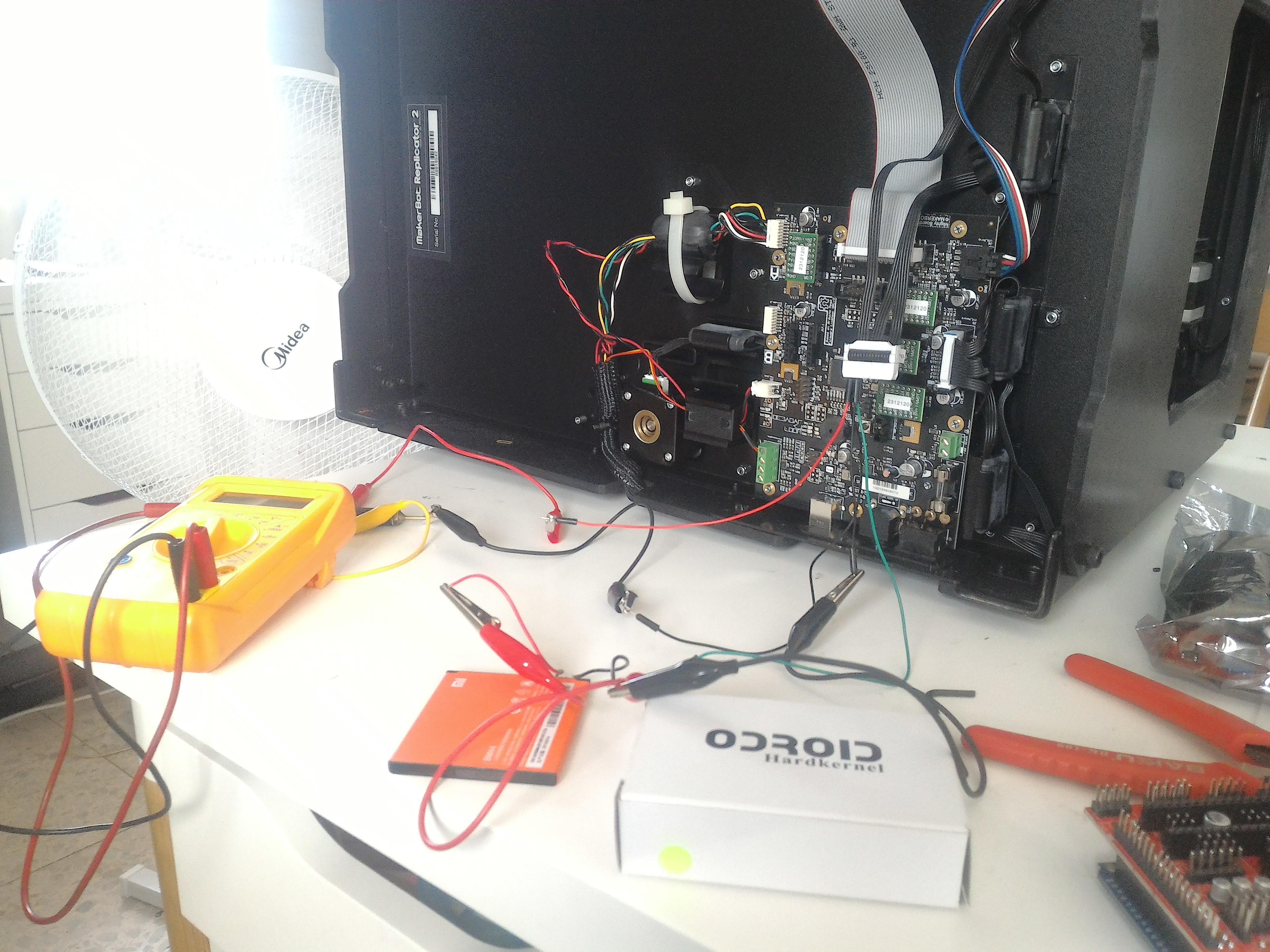
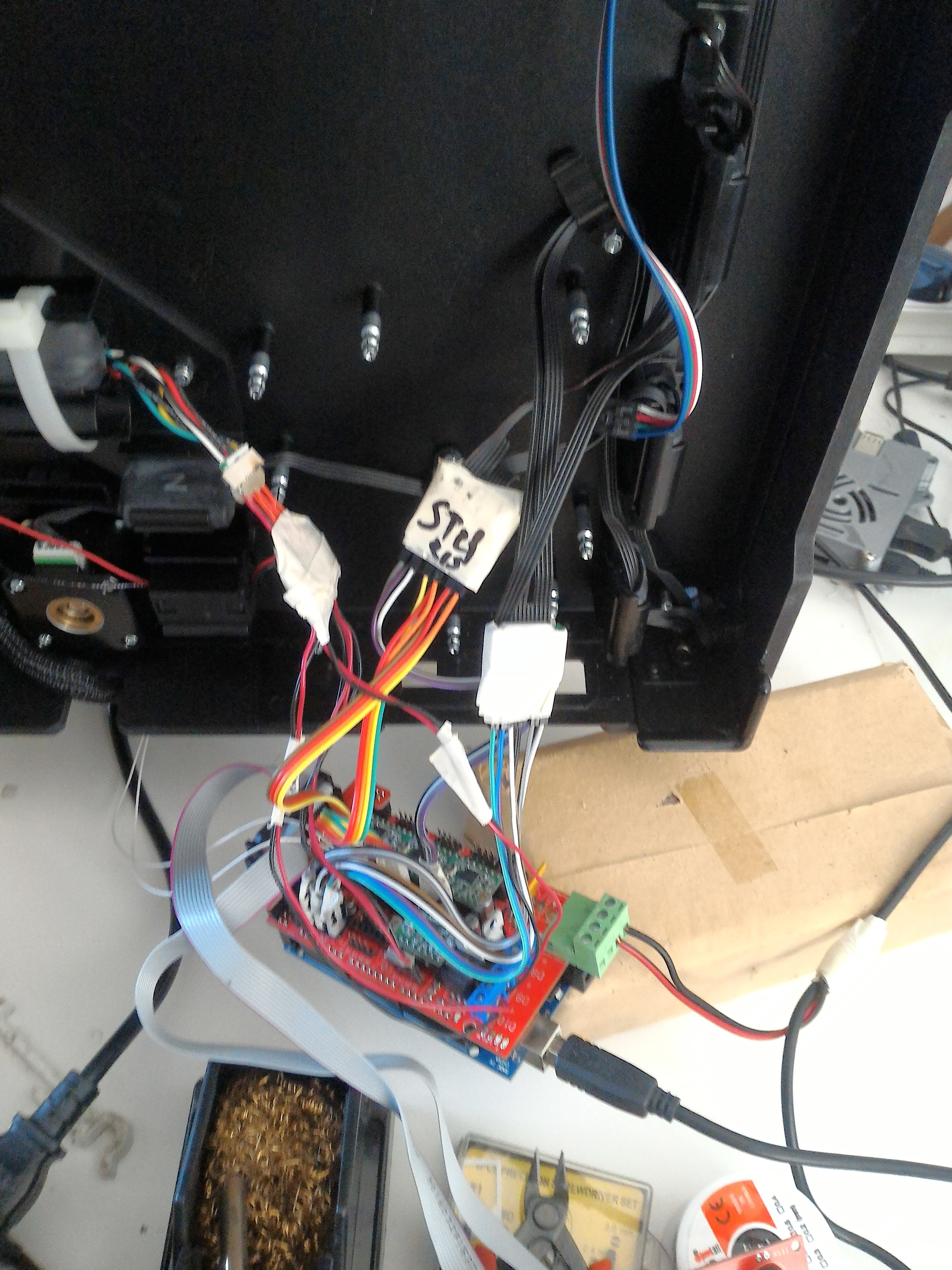
Updating my Makerbot Replicator 2 with up to date features
 Uriel Katz
Uriel KatzBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests






 Mo Badr
Mo Badr
 Torbjörn Lindholm
Torbjörn Lindholm
 Neven Boyanov
Neven Boyanov
 doctek
doctek
hi, I'm planning to do the same ting using a gt2560 board that can support 24v in order not to change the power supply, I have a replicator 1, did u had problems with the heated bed? does it use thermocuples? I still have to disassembly my printer but I wanted to first achive more informations :)