 Dan Royer
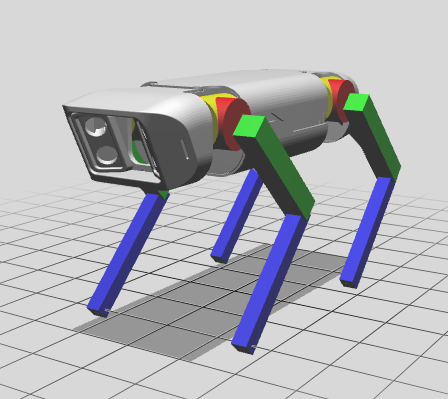
Dan RoyerRobot Overlord 3 makes it easy for your to simulate and program robots. It's great for robot arms, dogs, crabs, and more. Join us! Help make robots easier for everyone.
0%
0%
Robot Overlord 3
3D simulation and control software for robots
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
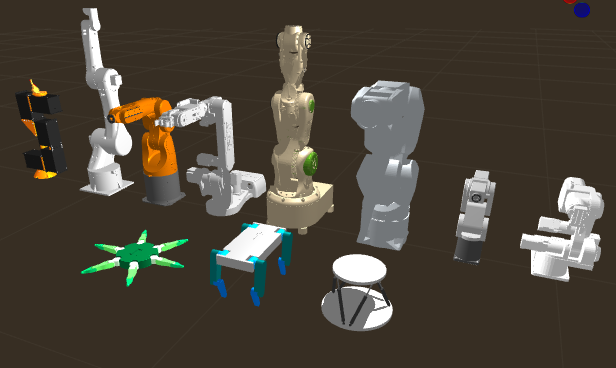 (back: Sixi3, Ben, K1, AR4, Mantis, Arctos, Meca500, PAROL6. front: crab, dog, and stewart examples)
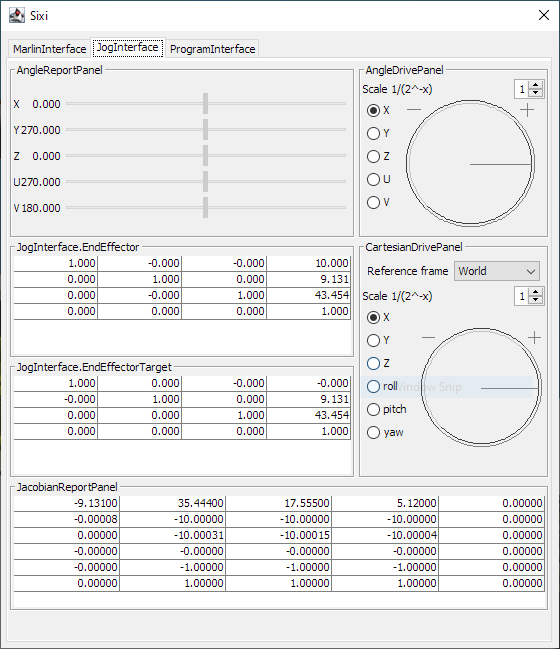
(back: Sixi3, Ben, K1, AR4, Mantis, Arctos, Meca500, PAROL6. front: crab, dog, and stewart examples) Straight to the API documentation. Nice!
Straight to the API documentation. Nice!






 Hippolyte
Hippolyte
 theotherlonestar
theotherlonestar
 Diego Balarezo
Diego Balarezo
 deʃhipu
deʃhipu
Hi,Great project. I'm very interested in the design process of this robotic arm.Now,I‘m a college student, and I want to design a 3D printing mechanical arm like this by myself, but I don't know how to start,I would appreciate it if you could give me some hints.