Dan Royer
Dan Royer-
3 alpha 3
01/11/2024 at 16:50 • 0 commentsHello!
I was suffering writer's block and so about a month ago I restarted from scratch and it has been SO GOOD. The system looks and runs better than ever before, there are more robots than ever before, and I am over the moon delighted at how much better things are flowing.
![]()
First off, the new system has dockable tabs, so rearrange to your heart's content.
Second, the graphics have finally left the fixed-function pipeline behind and now use shaders. Note the cast shadows. Chef's kiss gorgeous!
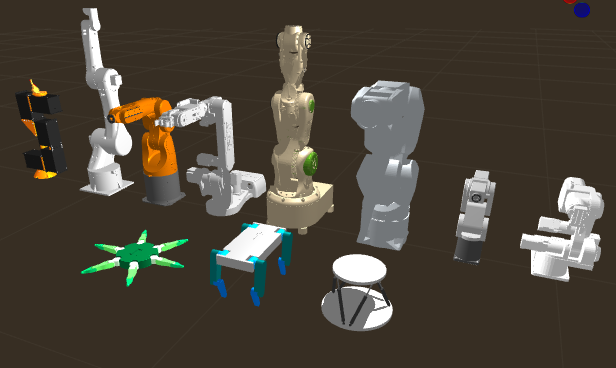
Third, there are more robots in the system than ever before. If you have a robot that CAN'T be simulated... challenge accepted!
(back: Sixi3, Ben, K1, AR4, Mantis, Arctos, Meca500, PAROL6. front: crab, dog, and stewart examples)
4th, this guy right here:
Straight to the API documentation. Nice!
Join us
Get the latest nightly build right now: https://github.com/MarginallyClever/Robot-Overlord-App/releases/tag/Nightly
Read the friendly manual here: https://mcr.dozuki.com/c/Robot_Overlord_3
Join us on Discord: https://discord.gg/q2W2dnhF8t
You can help
Spread the word! Tell your friends, tell your teachers, tell your club.
Make a Youtube video and give it a review.
Get the team to add your product line of robots, tools, and jigs. I'm Talking KUKA, Kawasaki, FANUC, and all the rest.
Got a big juicy brain full of ideas? How about adding some OpenCV, ODE4J physics, or AI? We welcome pull requests.
Artists! These meshes could use some love in Blender. A little cleaning, a little trim, some color... Make them look as good as they run.
-
2021 november update
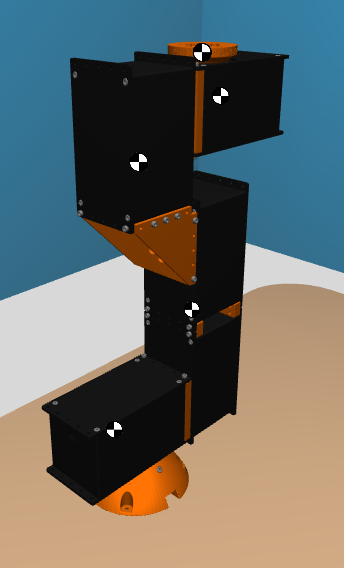
11/24/2021 at 18:28 • 0 comments1. centers of mass in the physics system
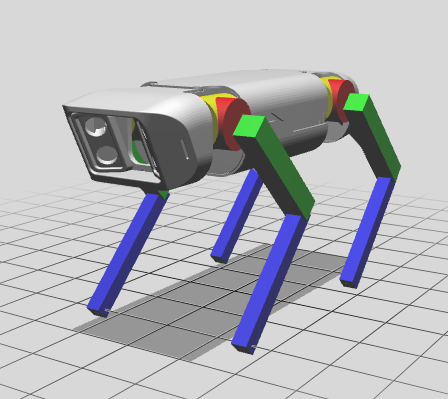
2. quad walker (spot mini) that will soon also have physics. once it falls realistically we can teach it to walk realistically
3. multiple arms running side by side, all with the same control scheme. sixi3, sixi2, Thor, MANTIS.
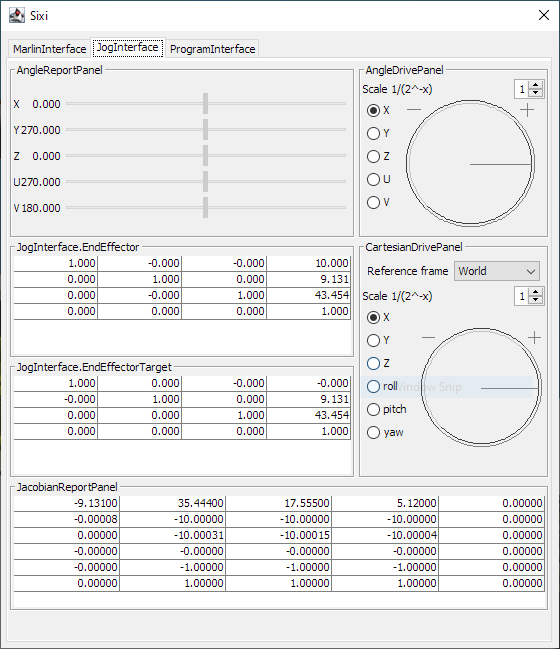
4. jog interface for robot arms. I'm quite pleased that every sub-panel can be run as a separate element and tested individually. So many Listeners....
![]()
![]()
![]()
![]()
-
Robot Overlord 1.6.1
05/14/2020 at 19:01 • 0 comments -
Robot Overlord 1.6.0
05/06/2020 at 15:47 • 0 comments -
Joystick support added
04/09/2019 at 17:18 • 0 commentsWorking in the dev branch. Release untested. No key mapping yet.
Looking for someone who wants to work on improving graphics: cleaning & texturing the models, adding shaders and cast shadows, more.
-
D-H parameters
04/04/2019 at 18:03 • 0 commentsIn an effort to make less terrible code I've build a DHRobot that uses D-H parameters. This greatly simplifies the underlying fabric of all the robot arms in the code. I've already got better IK working in the SHSixi2 and shortly I will be upgrading the other arms to use the new system.
Next is to get JInput working so that I can drive with a joystick.
-
THOR robot support added
08/09/2017 at 01:49 • 0 comments -
Thoughts on building robot programs
04/10/2017 at 01:24 • 1 comment -
A puzzle in Java
03/29/2017 at 18:08 • 0 comments -
Making it easier to develop for Robot Overlord
03/28/2017 at 18:12 • 0 comments
 (back: Sixi3, Ben, K1, AR4, Mantis, Arctos, Meca500, PAROL6. front: crab, dog, and stewart examples)
(back: Sixi3, Ben, K1, AR4, Mantis, Arctos, Meca500, PAROL6. front: crab, dog, and stewart examples) Straight to the API documentation. Nice!
Straight to the API documentation. Nice!