AngelLM
AngelLM-
Important Announcement: Community migration & Thor v2.1
11/24/2021 at 12:51 • 0 commentsHello everyone!
It has been a while since I last had the time and motivation to make a substantial improvement to this project. This time I have taken it up with enthusiasm and I think it has been worth the effort.
I'm proud to introduce you the new Thor's website. I did my best to gather all existing project documentation in one place. I have also taken the opportunity to add new documentation and improve the existing one in order to make the project accessible to more people.
![]()
And let's be honest, although it has been useful, Thor's Google Group mailing list is not pleasant to use. It's also a service that Google could eliminate from one day to the next, losing all the information there. That's why I've taken the trouble to migrate all the messages to a forum hosted on the new site, much more intuitive to use in my opinion.
![]()
I have migrated the users, but not the passwords, so if you had posted a message in this group you will have your user created in the new forum. To set your password you will have to follow this link.
From now on, the google group will be obsolete and only the new forum will be used, in order to centralise all information in one place.
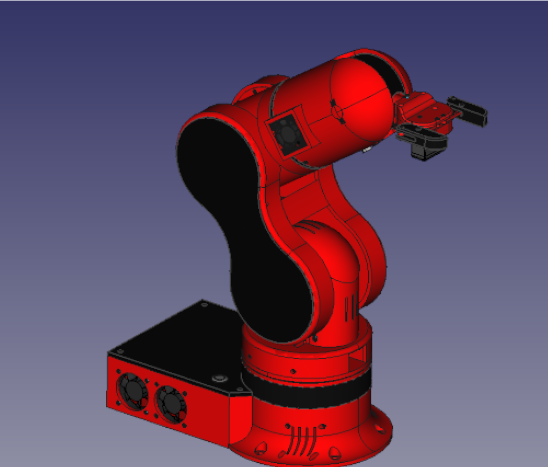
And this is not the only change I am proud to announce. I have also released a new Thor design. Designed in FreeCAD 0.19 and based on an old redesign I started a few years ago, Thor v2.1 is now available for download.
![]()
Besides the aesthetic changes it is worth mentioning the new features:
- Integrated electronics box.
- Ventilation grills in every articulation.
- Integrated fan holders.
- New gripper design.
- Several design fixes.
And that's all, I hope you like this new news and see you on the new website!
Best Regards, Ángel LM
-
Thor's 3rd Birthday!
08/31/2019 at 12:38 • 0 commentsIt has been 3 years since I released Thor! Woah, time goes by really fast.
As a birthday gift I want to boost this project, but I'll need help from the community to do it.
I want to gather all the features, improvements, crazy ideas... that you would want to see in the new version of Thor.
I have created a list where you can vote and add ideas in a quick and simple way. ¡Feel free to add anything! I will take them all in account!Thanks for these three years! :)
Ángel L.M.
-
Thor GUI - Asgard
02/18/2018 at 15:26 • 0 commentsHello everyone!
It has been more than a year since I released the Thor project. From the beginning, the project was very well received. It received tons of views, likes, comments, forks...
And more important than the "fame", the feedback started to arrive. Many people liked the robot, but not the way to control it. Not everyone knows how the GCodes work and, even if you know it, sometimes you don't want to type a GCode to move a robotic arm.So, some users started developing or adapting GUIs for Thor (I can't really express all my gratitude to they). But at this point, I don't really know the state of that GUIs.
That's why I decided to make my own program to control Thor. A GUI designed using Qt and programmed in Python. It's my first time programming something that doesn't use the terminal for the user interaction so please be gentle with me hahaha.
This GUI is called Asgard and is OpenSource too. You can find the source files at the Github repository. Do not hesitate if you want to collaborate in the development, help is always welcome!
These would be the key features of Asgard GUI: (features marked with a ✔ are already implemented!)
- User-friendly Graphical Interface ✔
- Forward Kinematics implementation (1st version) ✔
- Inverse Kinematics implementation (2nd version)
- Sequence Programmer (3rd version)
Some things that I have though about but not in the short-term:
- 3D display
- 3D IK Controller/Sequence Programmer
Finally, this is the current look of the graphical part of Asgard:
![]()
I'll be posting logs as the development reach the different versions. But if you want to be more in touch with Asgard and Thor notices and developments, I would recommend you to join us at Thor's Google Groups community!
If you have some suggestions/tips/comments please post them! I will be happy to know what do you think about this!
I'll keep you updated!
Ángel L.M. -
Commercial Sensors Adaptation!
08/17/2017 at 09:31 • 0 commentsHi there!
It’s been a long time since the last time I wrote a log! I’m back!
Thor’s community is growing fast! There are (at least) 4 Thors assembled & operational around the world and another 17 being built! There are schools and universities relying on Thor for teach robotics… Great yaaay!
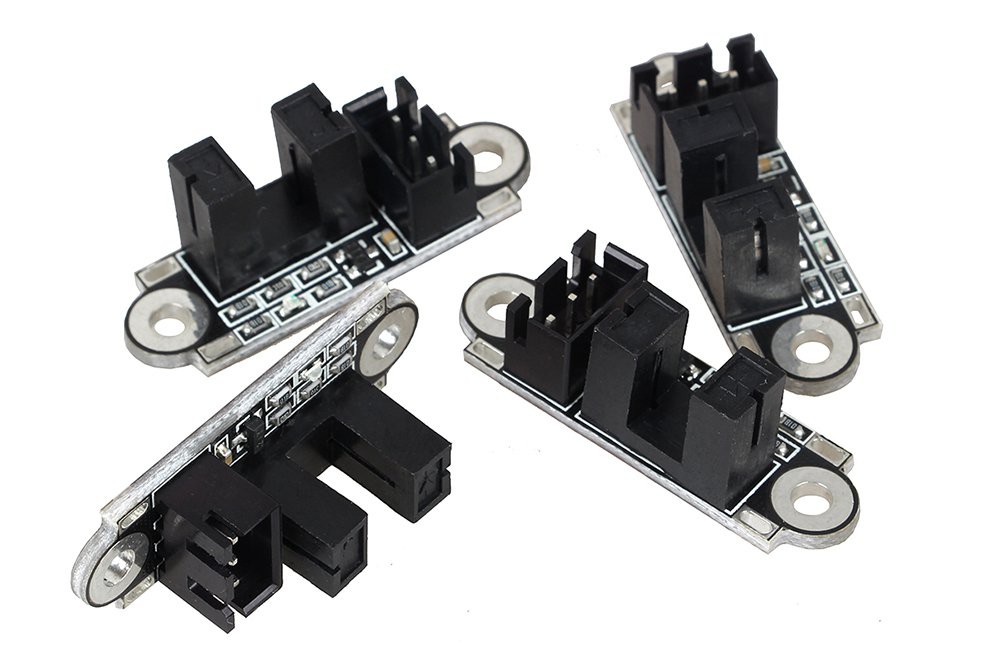
The more people are interested in this project, the more feedback I get. Recently I have received several questions about the sensors I’m using to establish the home position of Thor (opto-couplers, opto-transistors, opto-switches… whatever). To be honest, until now it was pretty tricky… I made my own sensors using a DIY CNC for the PCBs and soldering the components by myself. As this project has attracted different kinds of people, I thought that it could be nice to simplify this issue: making Thor compatible with commercial sensors instead of creating the custom ones. Let’s try to not reinventing the wheel!
The first thing was to find a cheap commercial sensor which could fit inside Thor. To make things easier, I was looking for a single model which could fit in the 4 articulations. For the first three ones was an easy task, but the sensor located in the Art3body piece for the 4th Articulation had to be pretty small to not collide with the Art4TransmissionColumn piece.
Finally I found this one in Aliexpress which met all my needs. I think that it won’t be hard to find that kind of sensors in other online-shops, but I tend to use Aliexpress because of its large catalogue.
![]()
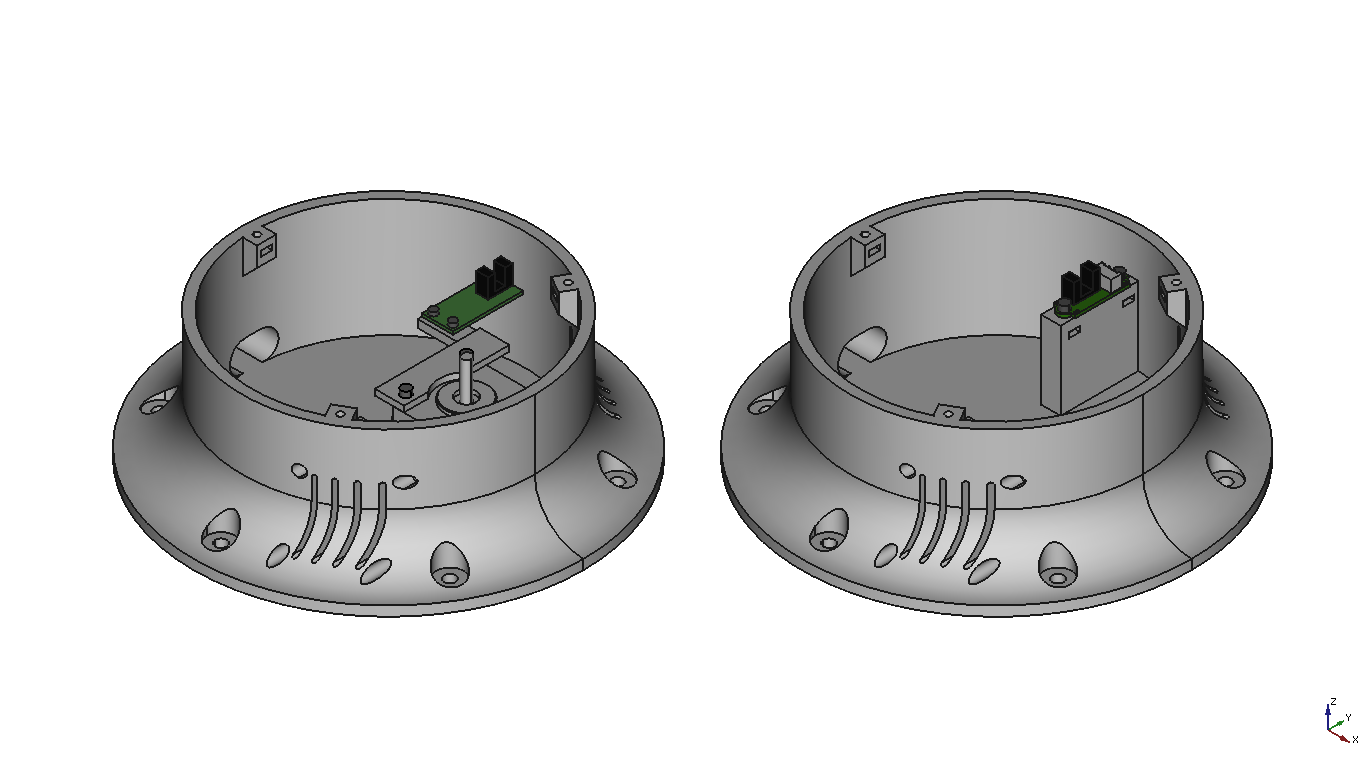
So, without further ado, these are the changes I made in the design (on the left side the old design and on the right side the new design):
The sensor for the 1st Articulation is now fixed to the BaseBot piece.
![]()
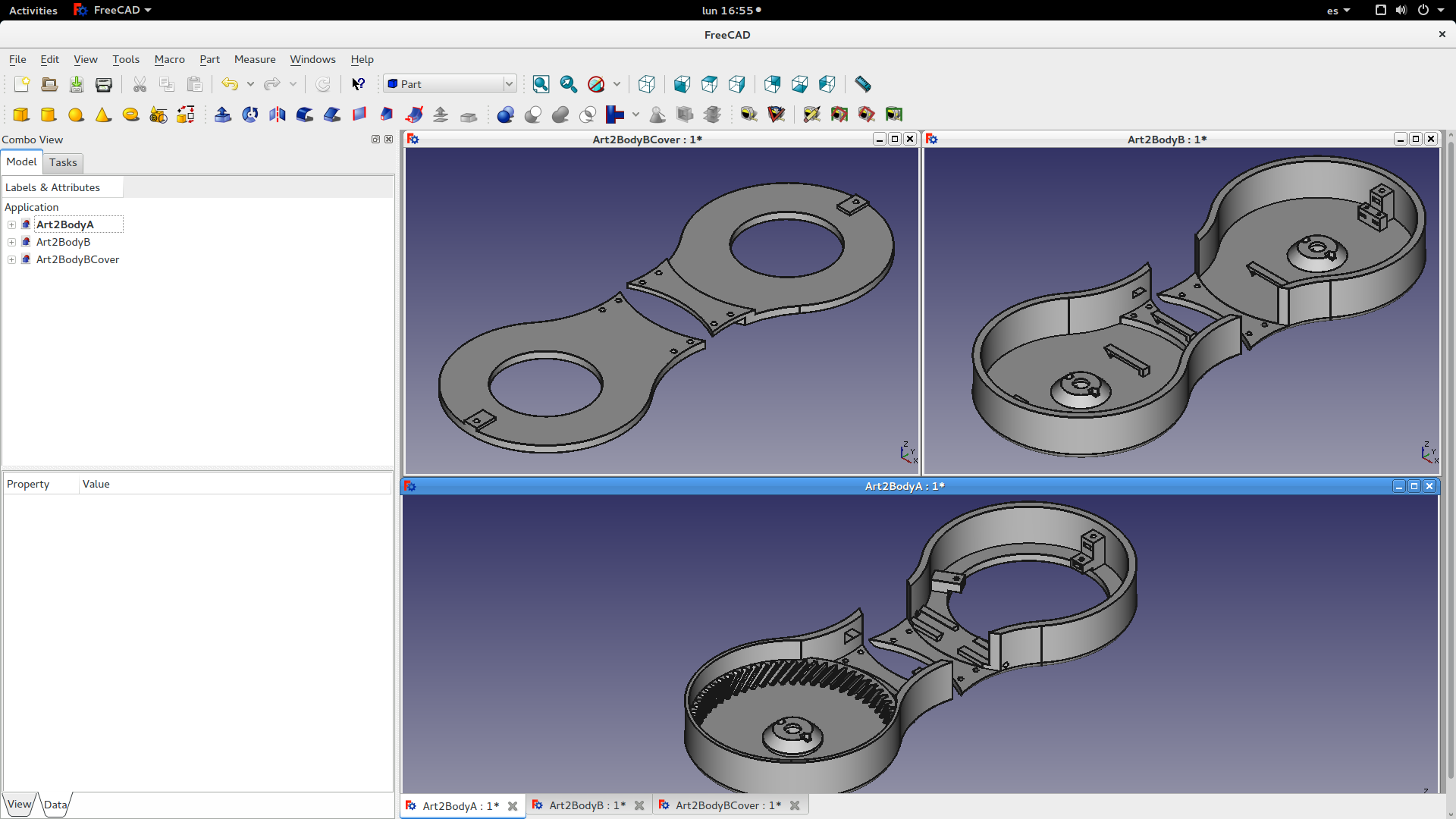
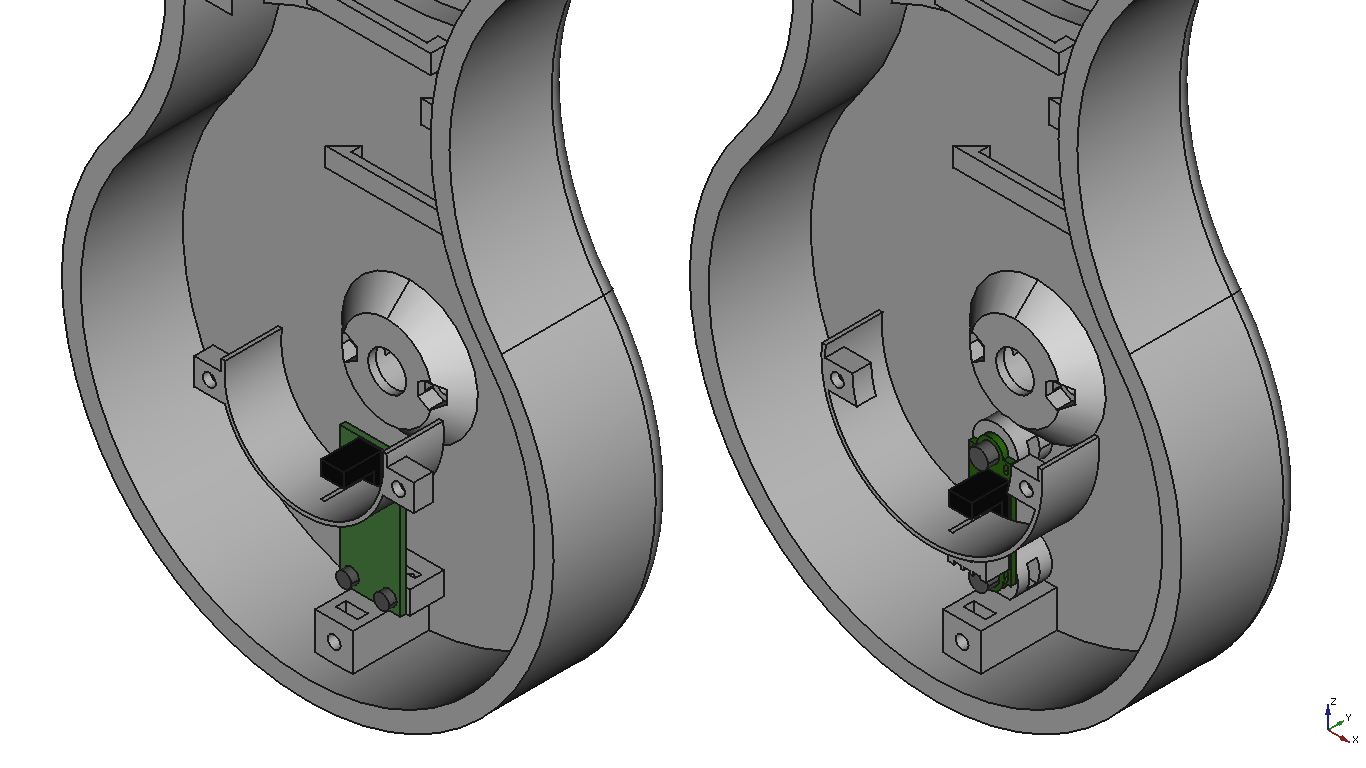
The sensor for the 2nd and 3rd Articulations are placed in a similar position as the custom ones, I modified the Art2BodyB piece adding fixing point for them. Also, the Art23Optodisk has been redesigned to work properly with the new distances.
![]()
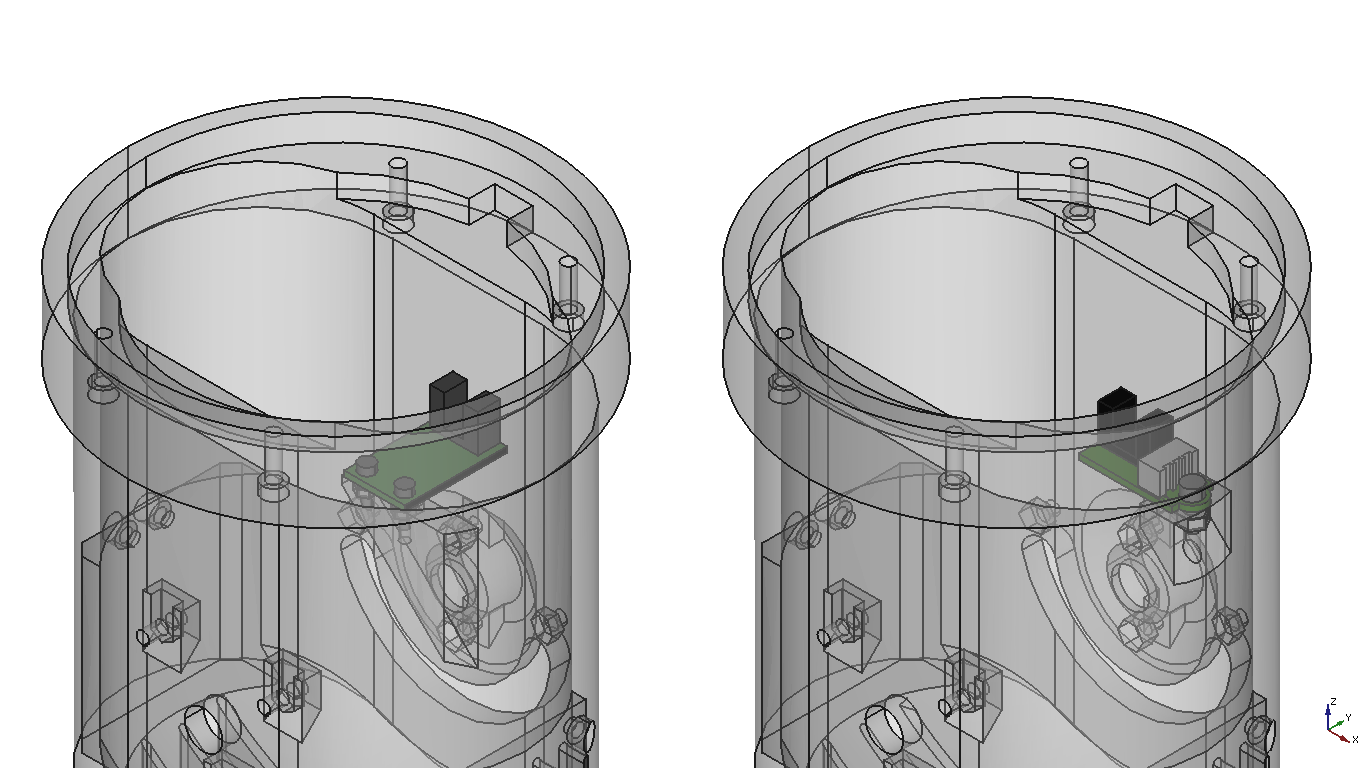
The Art3Body piece has been redesigned to fix the sensor of the 4th Articulation. The board of this sensor has to be cut to avoid the collision with the Art4TransmissionColumn piece. Do not worry about that cut, there are no circuits in that zone of the PCB, so can be cut gently.
![]()
I have only tested it using the 3D models. The sensors fit, but presumably the connector of each sensor will have to be replaced with other flatter.
FYI: the last commit where you can find the older files (the ones for the custom sensors) is this one: b86594c4d48fa64d71cc373a52b4e3dac6e4bde9
Do you like it?
Ángel L.M.
-
THOR support in Robot Overlord
08/08/2017 at 19:28 • 0 commentsIt's the crossover episode you've been dreaming about!
https://www.instagram.com/p/BXi0Ci4gLqb
THOR robot arm is now simulated in Robot Overlord. Forward and Inverse kinematics can be manipulated visually in 3D. I feel confident it won't be long before RO is talking to the firmware and any THOR owner can drive their arm from the software. One step closer to fully open source process automation!
Special thanks to @angelILM for producing the STL files and dimensions on request.
-
Control PCB Wiring Diagram
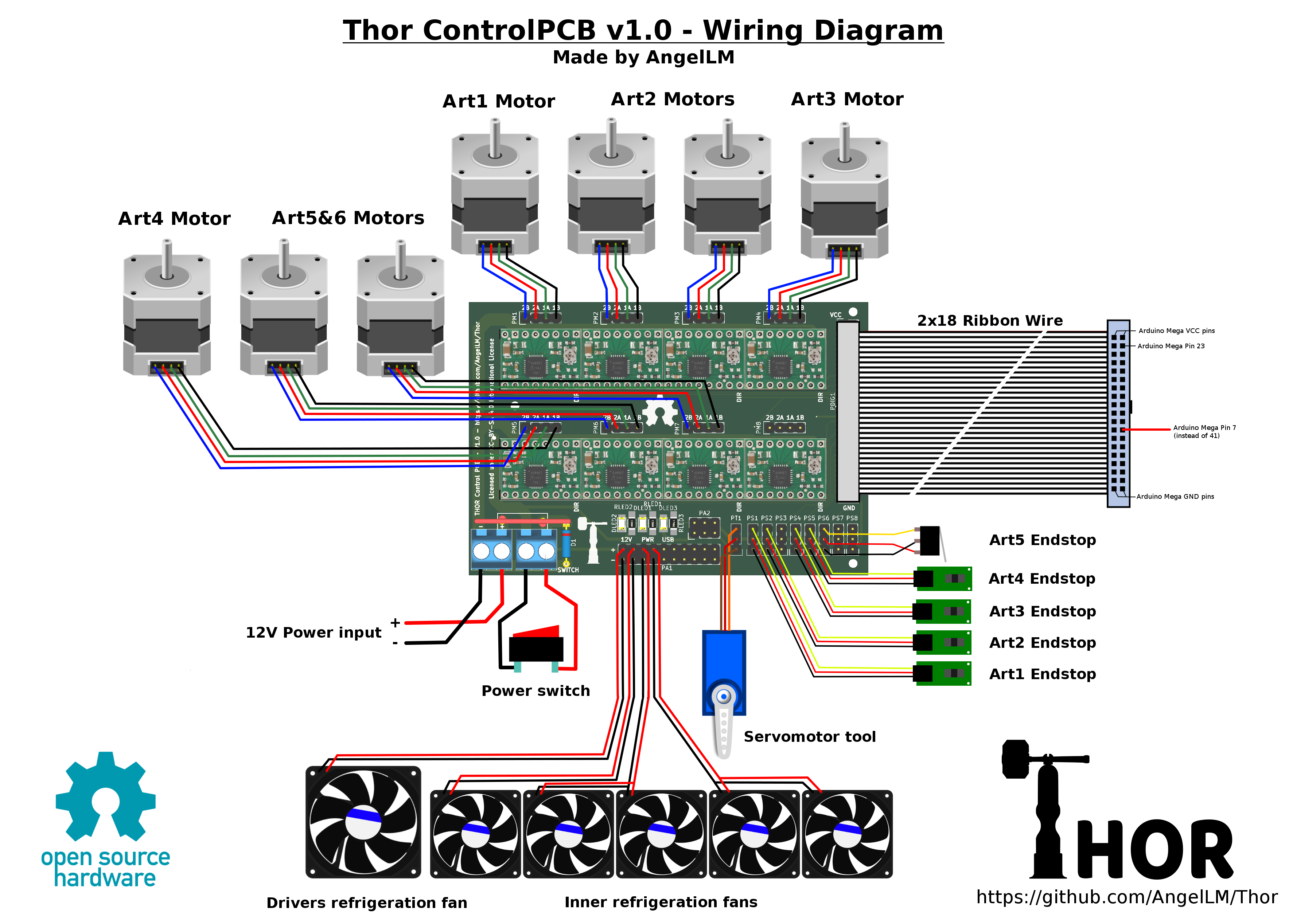
04/22/2017 at 14:13 • 2 commentsI just made a Wiring Diagram for the Control PCB v1.0 board.
![]() You will find the full resolution image & source files at the Github repo.
You will find the full resolution image & source files at the Github repo.I want to remind that there is a Google Groups community with 90 members in this right moment where you can ask, share and read about this project! Join us! :)
Check soon my fork of the grbl repo to get the lastest firmware for the ControlPCB board.
Best regards,
Ángel LM -
Thor's community is now online
01/15/2017 at 16:30 • 3 commentsHi!
Since a few weeks I'm receiving a lot of questions/feedback/information from many different directions (email, Twitter, Hackaday, Thingiverse, GitHub, Wevolver, etc.).
One thing is clear, this project has become known, at least more known than I expected at the beginning, and I cannot do other than thank you! Thank you for your likes, your comments, your feedback, for sharing the project, contributing to it and for building a Thor. You rock!Also, from the very beginning I wanted everyone to became part of this project and share all the information. I think that the current platforms I'm using are not the ideal ones to develop a community project. Using a lot of platforms is convenient for spreading the word, but not for focus the information...
That's why I decided to make the Thor mail-list community. I have been in other communities of Google Groups and it works so well. Everyone can access, everyone can ask/answer/show, it's easy and clear and it's free. In this way I want to share all the info I have with you all. And you will be able to help, give/get feedback and share your ideas, progress and modifications with other community members.
From now I'll group all info there and I'll be answering the questions there. I'll be posting there my progress and changes too (I will still doing that here too).
See you there!
EDIT: I forgot to say that I also did a Frequently Asked Questions in order to answer them :)
-
Danny's mods incorporated!
12/19/2016 at 16:05 • 5 commentsHi!
Time ago, Danny made some modifications to largest pieces, splitting them and making them printable in 180*180mm bed area printers.
He made an awesome work, and I wanted that modifications to be in the main repo, so I added it! Also, I migrated the design to FreeCAD in order to have the source files too ;)
![]()
EDIT 21/12/16: I have migrated another 2 modifications to FreeCAD :)
![]()
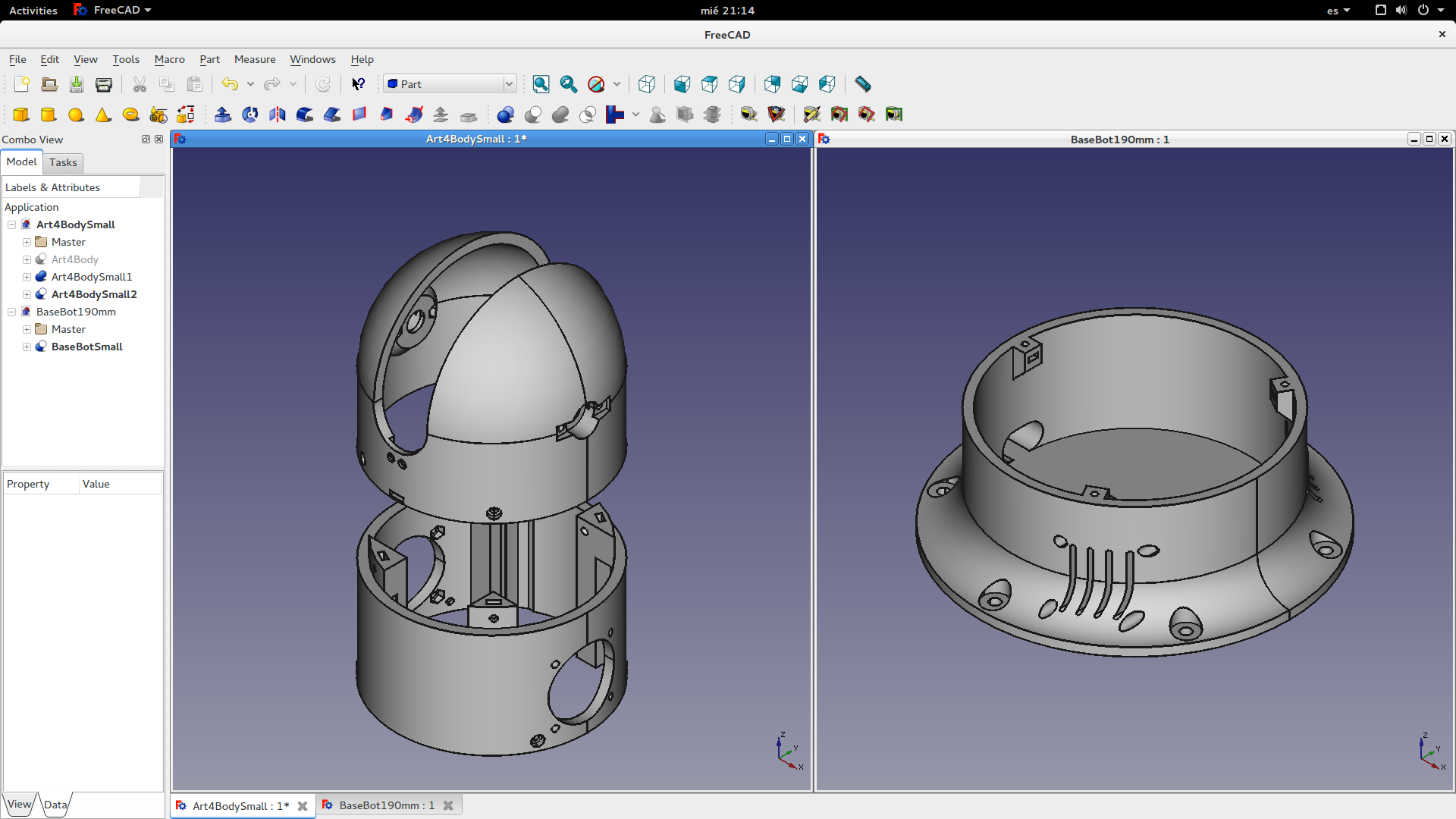
On the left, my remix of Art4Body modification made by Danny. Designed for low height printers, thank you again Danny :)
On the right, the BaseBot modification made by Ctrl-Alt-Dude for 190*190mm print area. This will allow more users to print Thor. Thank you too! ;)
Are you having issues with other pieces?
Season's greetings for all!
-
New ControlPVB PCB arrived!
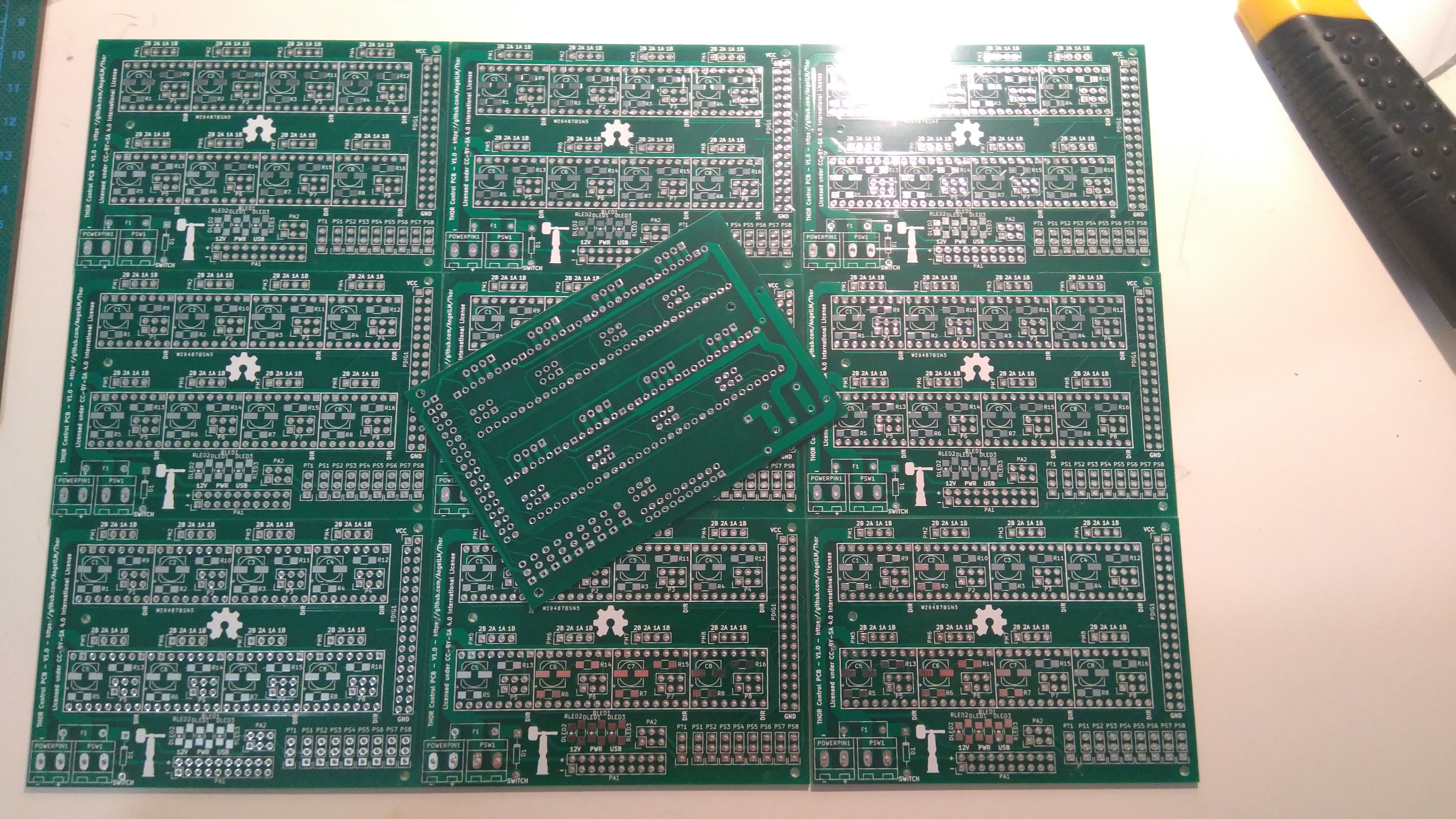
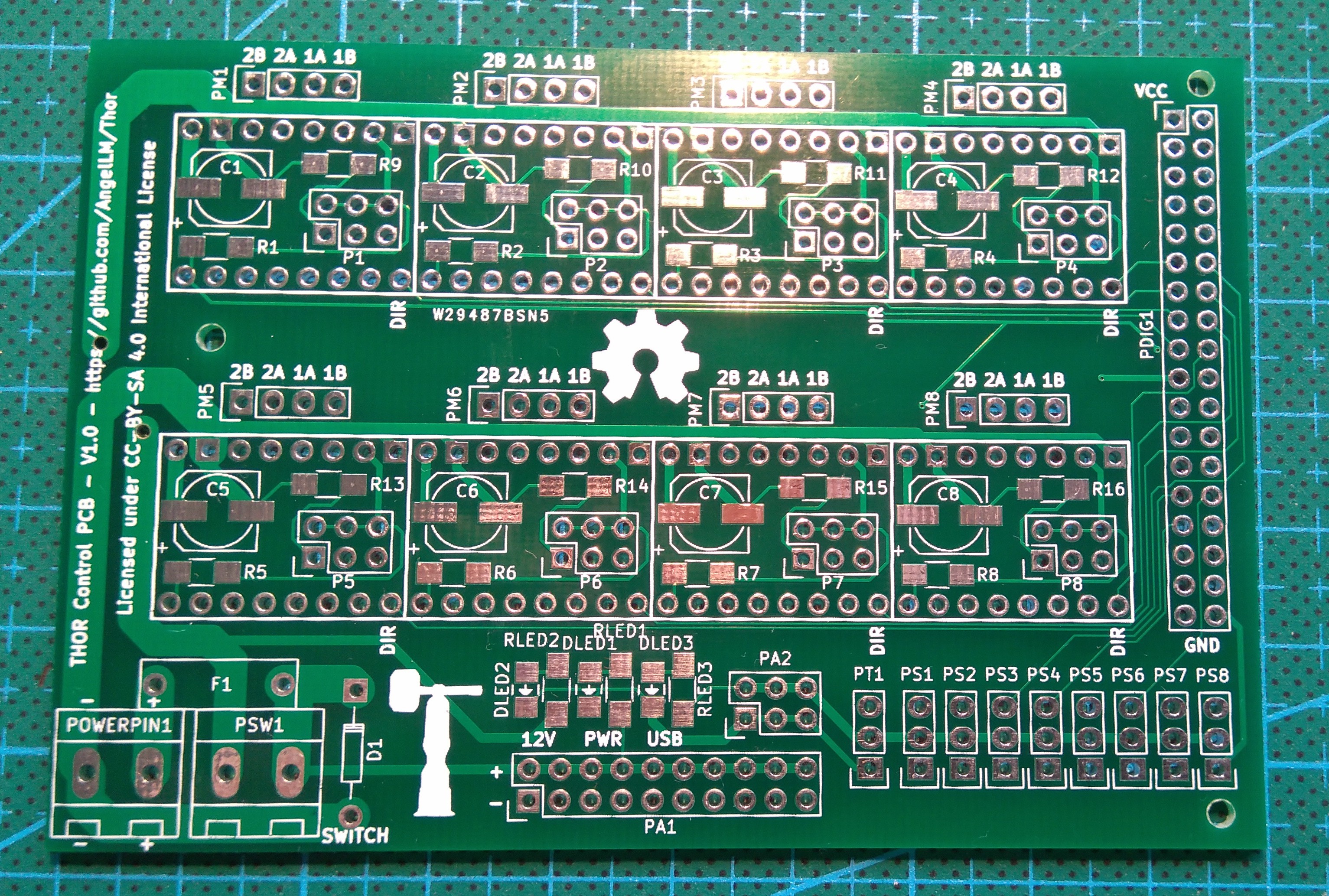
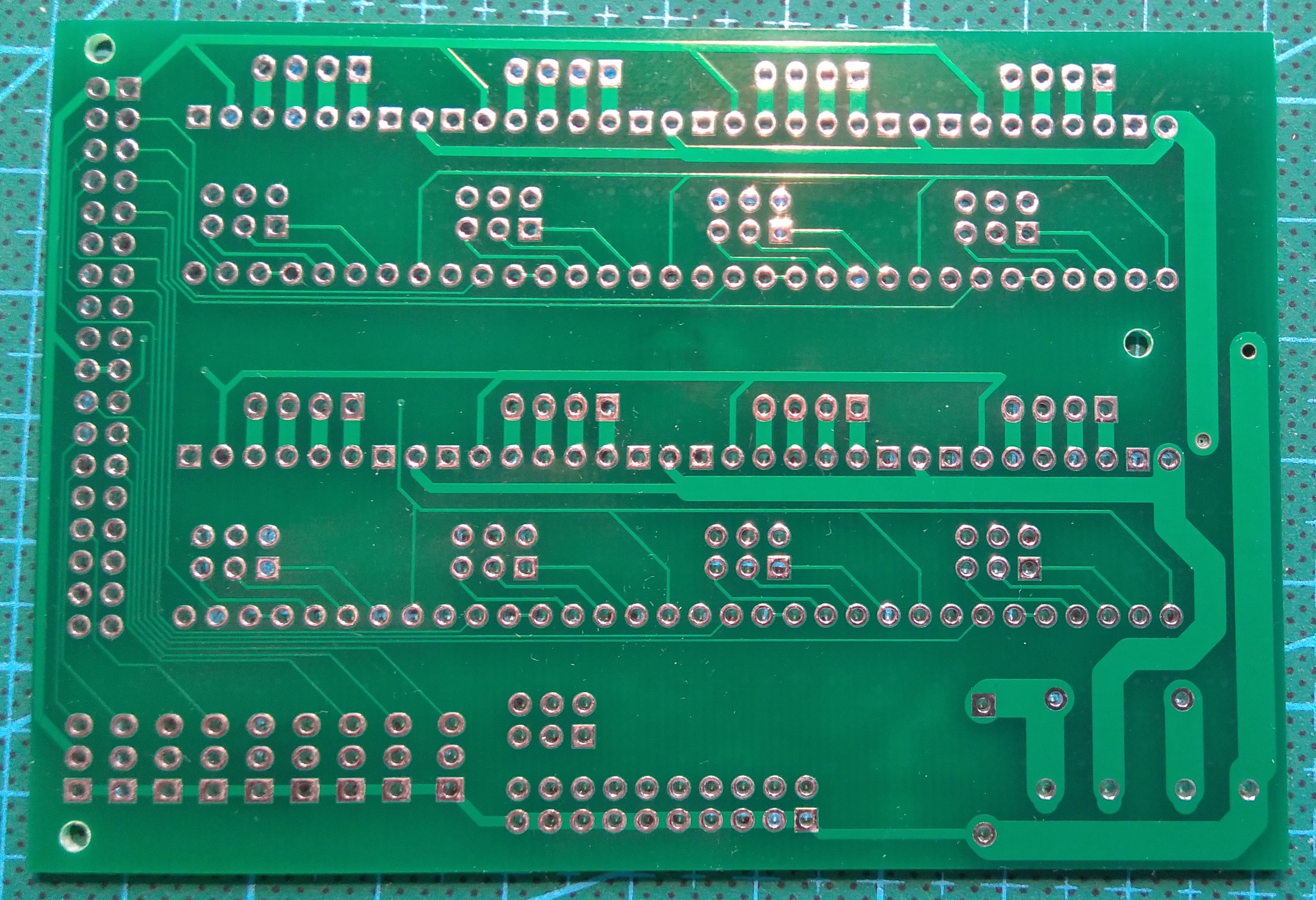
12/16/2016 at 14:33 • 1 commentYay! I received them 3 days ago... Exciting!
![]()
I ordered them to PCBWay and my experience was great! They are fast, kind and very cheap :D And the quality of the PCBs is incredible, very professional. I'll work with them again for sure!
As you see I have designed it for THT and SMD (1206 package) components. I never used SMD before, but there's a first time for everything haha.
![]()
![]()
Now, it's time to wait for the arrival of the components... I think that it will take about a month or two... I don't know if I'll be that patient...
Hope you like it! :)
-
New electronic board very soon!
12/07/2016 at 21:43 • 2 commentsWoah, more than 300 followers! Hello everyone!
As I said weeks ago, I needed a new electronic board to control Thor... The one I was using had many mistakes (a man may learn wit every day...) and I got tired of botching it. The initial idea was design a DIY PCB board, but due to its limitations and how cheap is to manufacture it in China I decided to design a better control board.
Of course using OpenSource software, KiCad again.
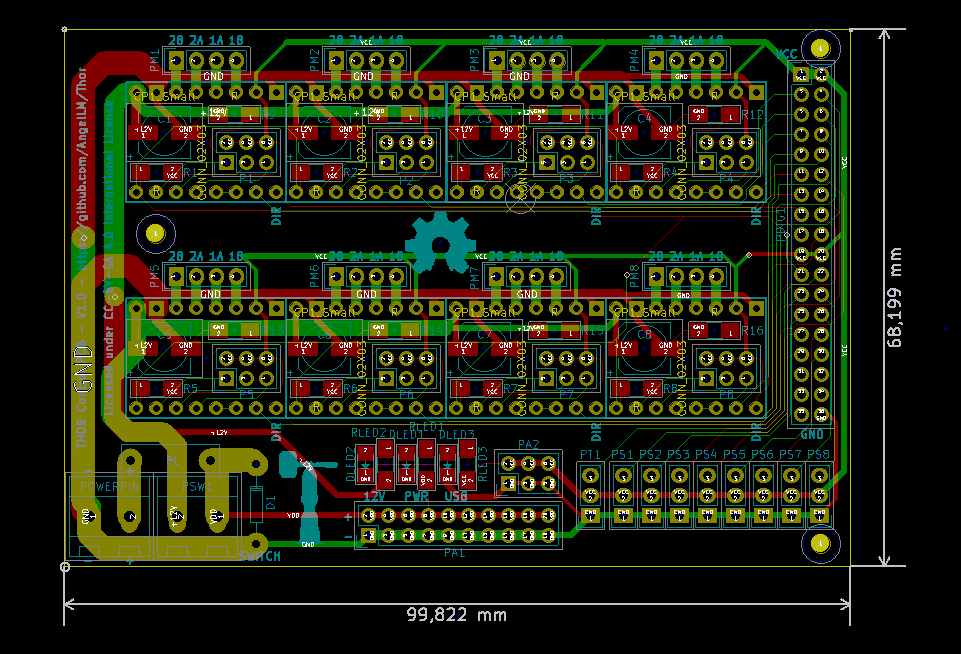
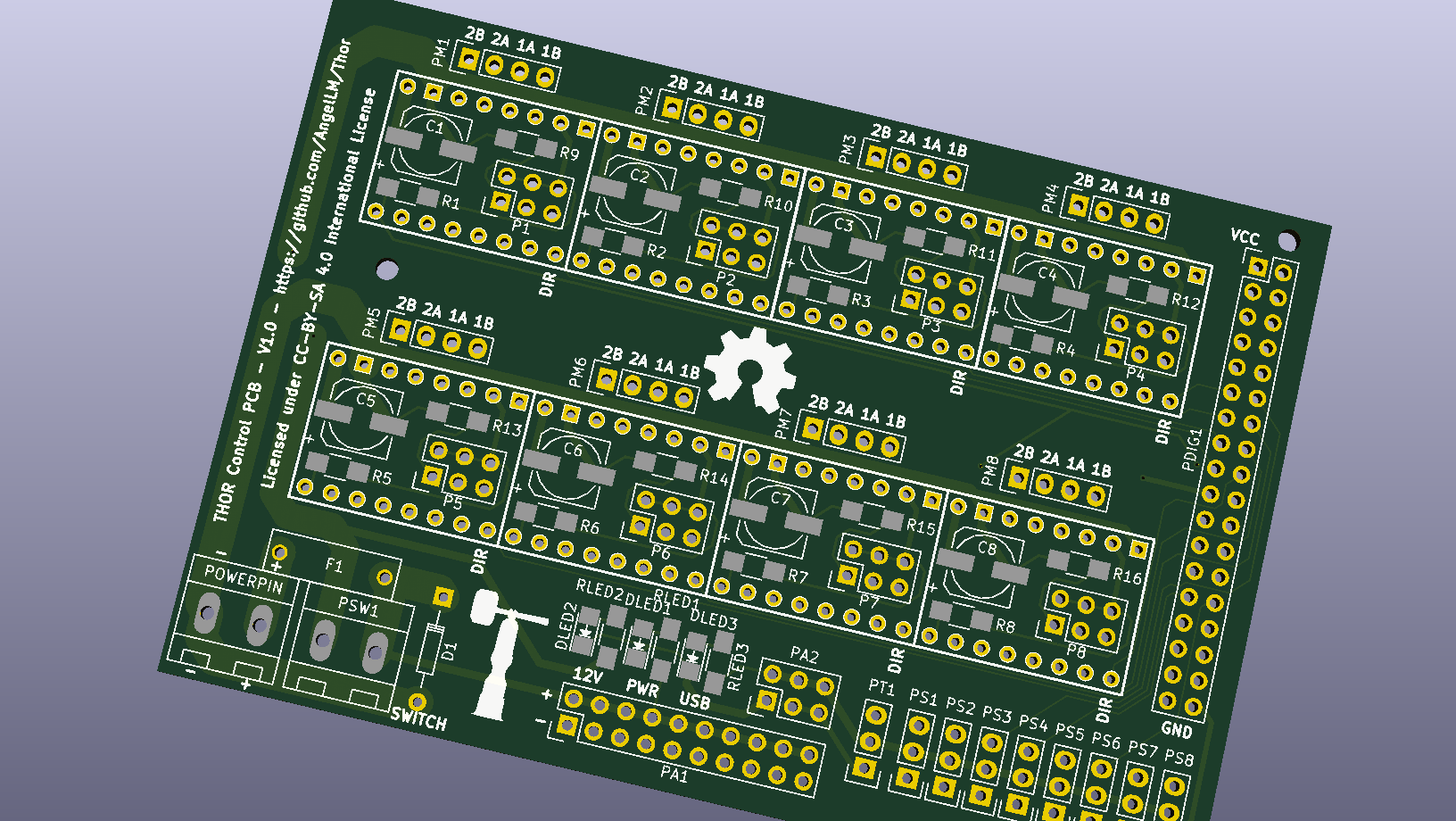
First of all, some pictures:
![]()
![]()
It took me a few hours to understand the values that I had to set (track width, drills diameters, etc.) in order to send it to the manufacturer... but it won't happen the next time >:D
Anyway, the new features:
- First and the most necessary: Reverse current protection circuit. No more burned drivers because of mistaken power input polarity... It will save my wallet!
- This board allows to control up to 8 stepper drivers (instead of 7 of the previous version).
- Smaller size: Less than 100mm*70mm.
- Easier assembly: the Silkscreen is a nice helper!
- Added 3 confirmation LEDs (Power Input, PCB Power, Arduino Power).
- Added more 12V aux outputs for the fans.
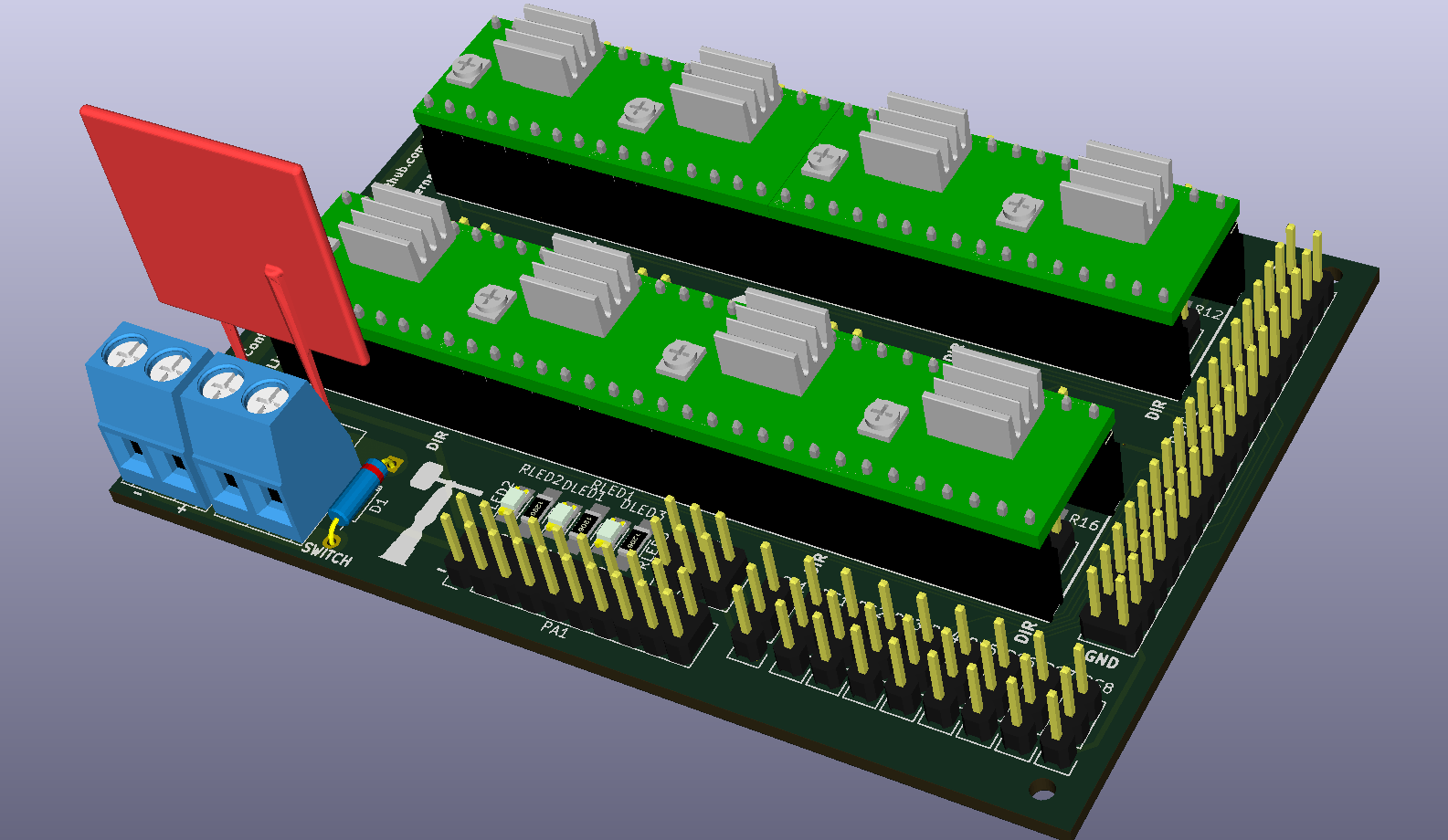
- Added a switch to power off the steppers and keep the fans working.
- The connections between the drivers and the male pins that connect with the Arduino Mega are now well driven. This has been possible thanks to the 2 layers board, and it will allows to simply connect a ribbon cable with a 2x18 connector without "hacking it"
And I think that's all! I'll send it to the manufacturer as soon as I finish another PCB I'm designing.
Of course, I shared it on the Thor's Github repository. If you are reading this close to the publish date, you will find the new PCB files in the ControlPCBUpdate branch. Feel free to take a look and share your opinions!
![]()
Hope you like it!
Best regards,
Ángel LM

 You will find the full resolution image & source files at the
You will find the full resolution image & source files at the