 Roberto Vicente Romero
Roberto Vicente RomeroToday, we decided to split into groups because we're in a hurry here and there are only a few days left... It seemed necessary, so each team could be more focused while doing their part.
Three teams were constituted.
- Structure Team
The order arrived with the material (pipes and bends).

This unit took care of two things at first:
- Drilling holes (Ø 68mm) along the pipe for pots (20 holes/pipe)
- Assembling the buckets. (a total of 80 pots)
The PVC plastic wasn’t really thick so drilling the holes with a drill and a circular saw was relatively easy.


Plastic cups (x80) were cut in half, and the upper side was used as the container. The ground was constructed with a black plastic film imitating a base. Their were glued toghether adding non-water-soluble glue on the outer face of the cups to avoid any possible contact between it and plants. (this was easier but it took much time)


- Support Team
This time, we wanted to hang the ultimate prototype. Thus, this part of the crew had to design and cut a support structure which could hold it in place.
We drafted through Vcarve a support structure. This design set four levels (one level/pipe) of structure. Four spaces to keep on place the pipes were carved into the wood. Additionally, it had some height differences of 10mm between holes to create a subtle slope along each pipe. Afterwards, we cut it using our lab’s CNC.
(File link: https://hackaday.io/project/13008/files ).

We also produce a funnel to gather water at the end of the prototype. In such manner that no water loss occurred. Also, we could redirect the water flow to a hose and then a tank. Therefore our concerns about flooding the floor'd vanish. We left the 3D printer working all night (because it said it'd take almost 8h). We should have thought it before but things come when they come. Anyway, tomorrow it should be finished.
File link: https://hackaday.io/project/13008/files)
- Electronics Team
Finally, the most important part.
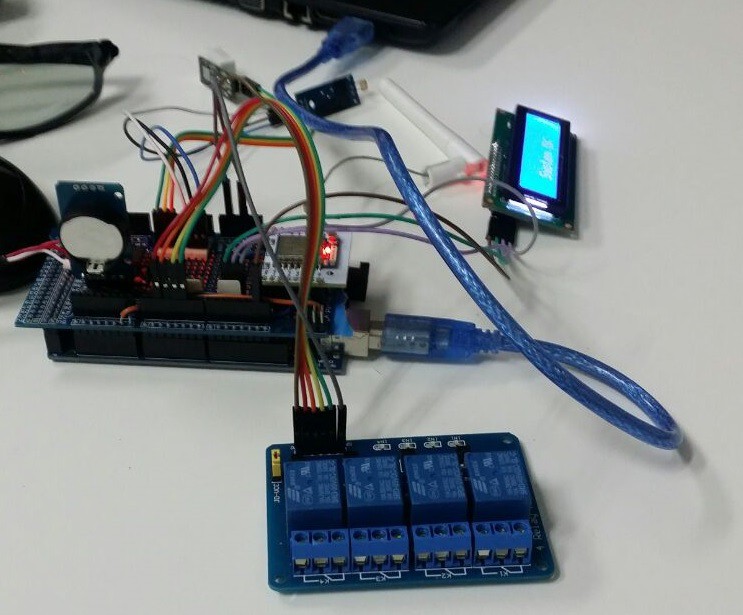
After testing every component and having regulated every sensor, it was time for some coding. The third group had the most important part to accomplish:
It was to programm every aspect of the genuino controller (HGC).
They had already started for a couple of days with no rush, but today as the self-imposed deadline, it took almost all day to code everything correctly.
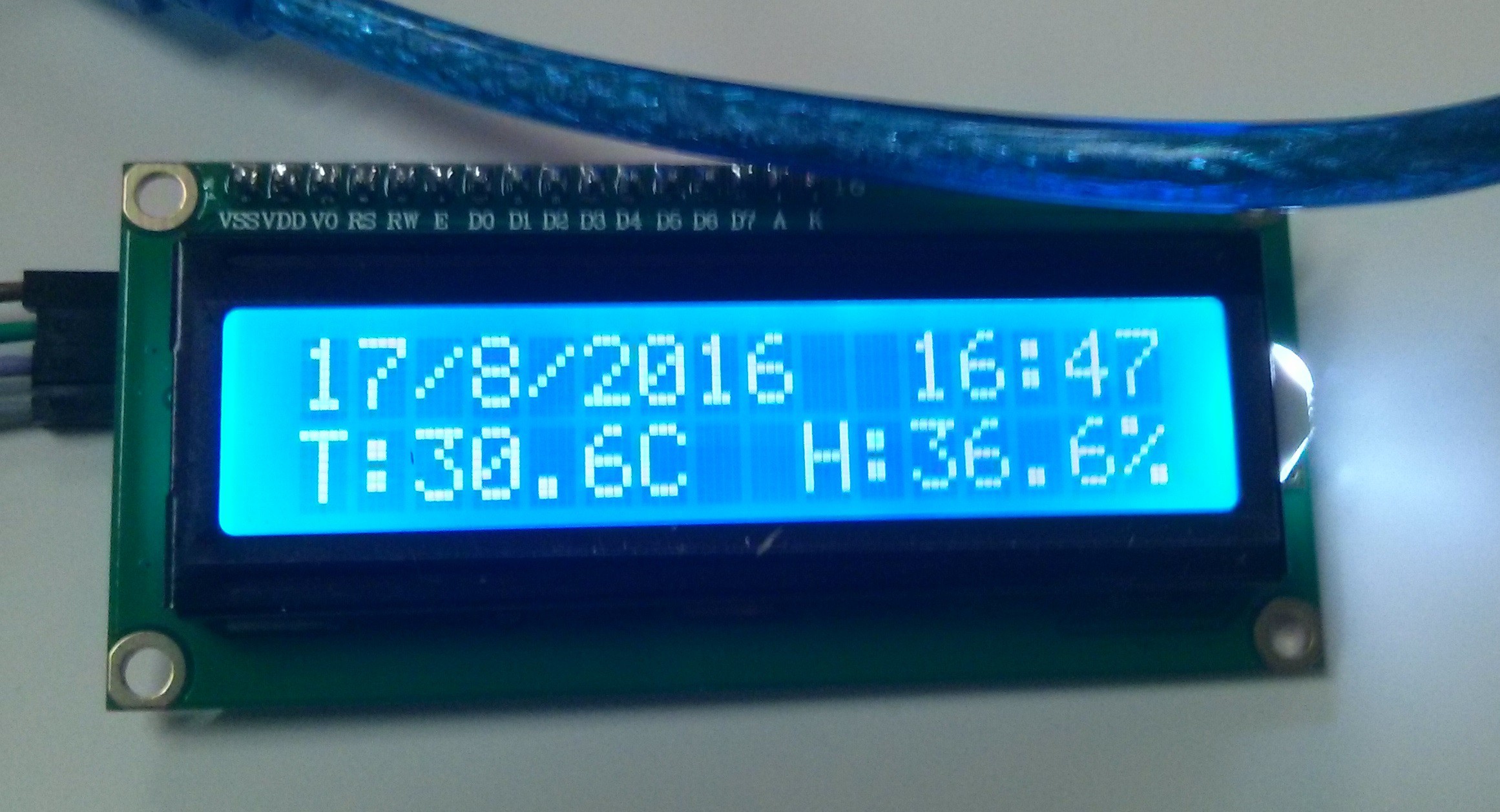
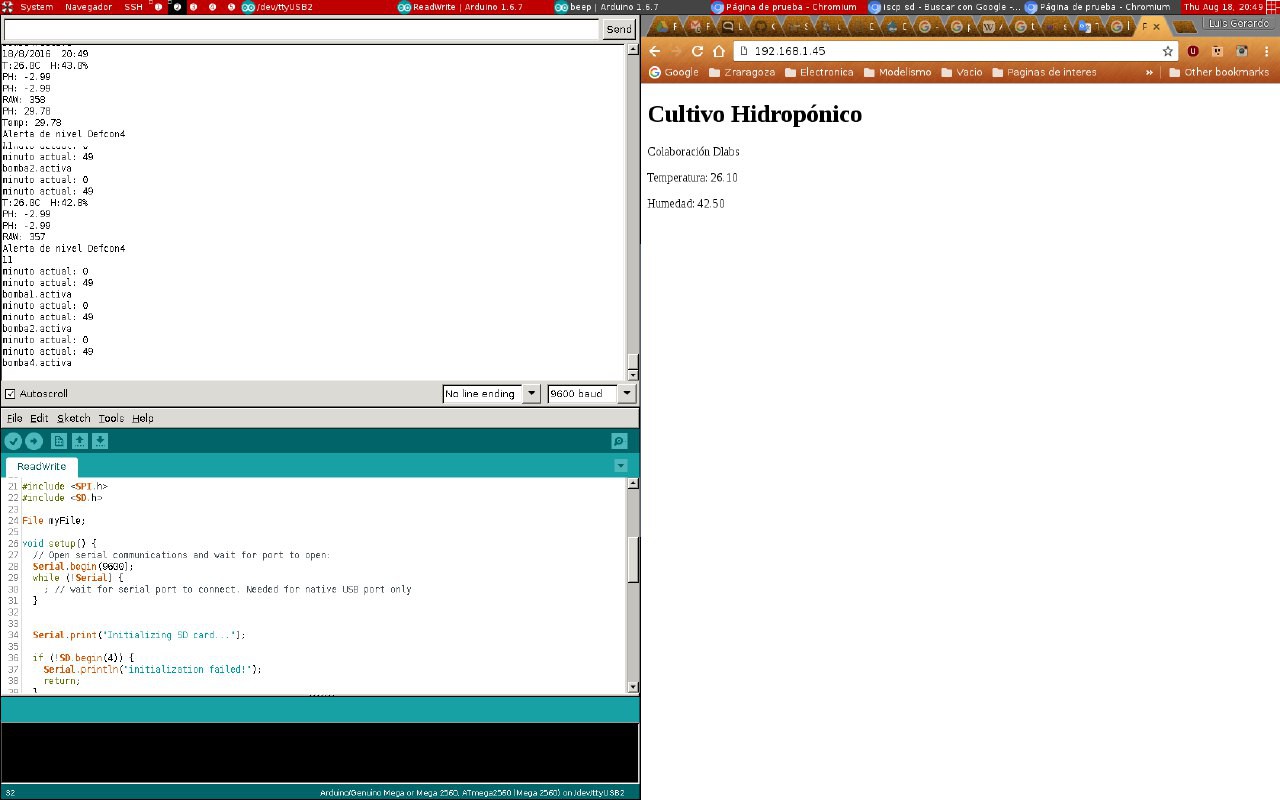
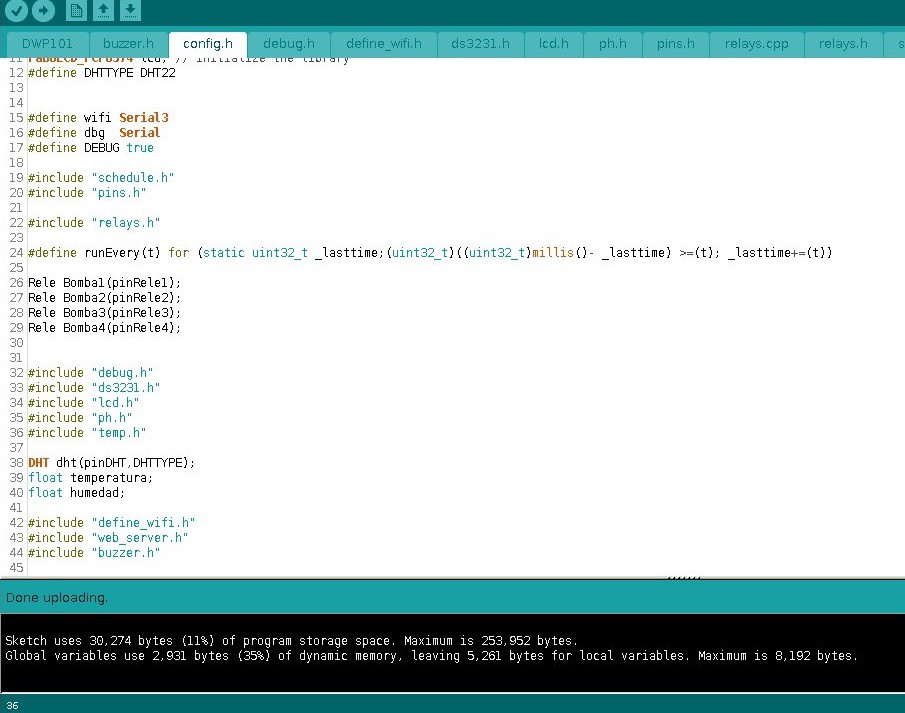
Additionally, they welded the pieces together. On the pictures you can see the main screen of HGC,(already working!) and the website where all data'll be posted.
The programming was developped in C++, We took advantage of the Object-oriented programming, but some problems emerged, because we didn't organised our library correctly. It has been really interesting working in this project because of its closeness to a real production system. Originally, planification was really strict, but as the project grew, we realised everything wasn't going to be ready for the 2016 Hackaday Prize. In any case, we keep improving the code everyday and the basics are ready to work.
Temperature, humidity and pH are being controlled. We have incorporated an alarm voice system upon the log error detection. Doing so, we have delimited the alarm noise upon the DEFCON standards (from 1 to 5)
Programming is ready for error correction, and system's information feedback.
To find the Initial Boot Video of HGC follow the link:
https://hackaday.io/project/13008-automatized-hydroponic-vertical-crop/files
It's almost finished guys!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.