 nerd.king
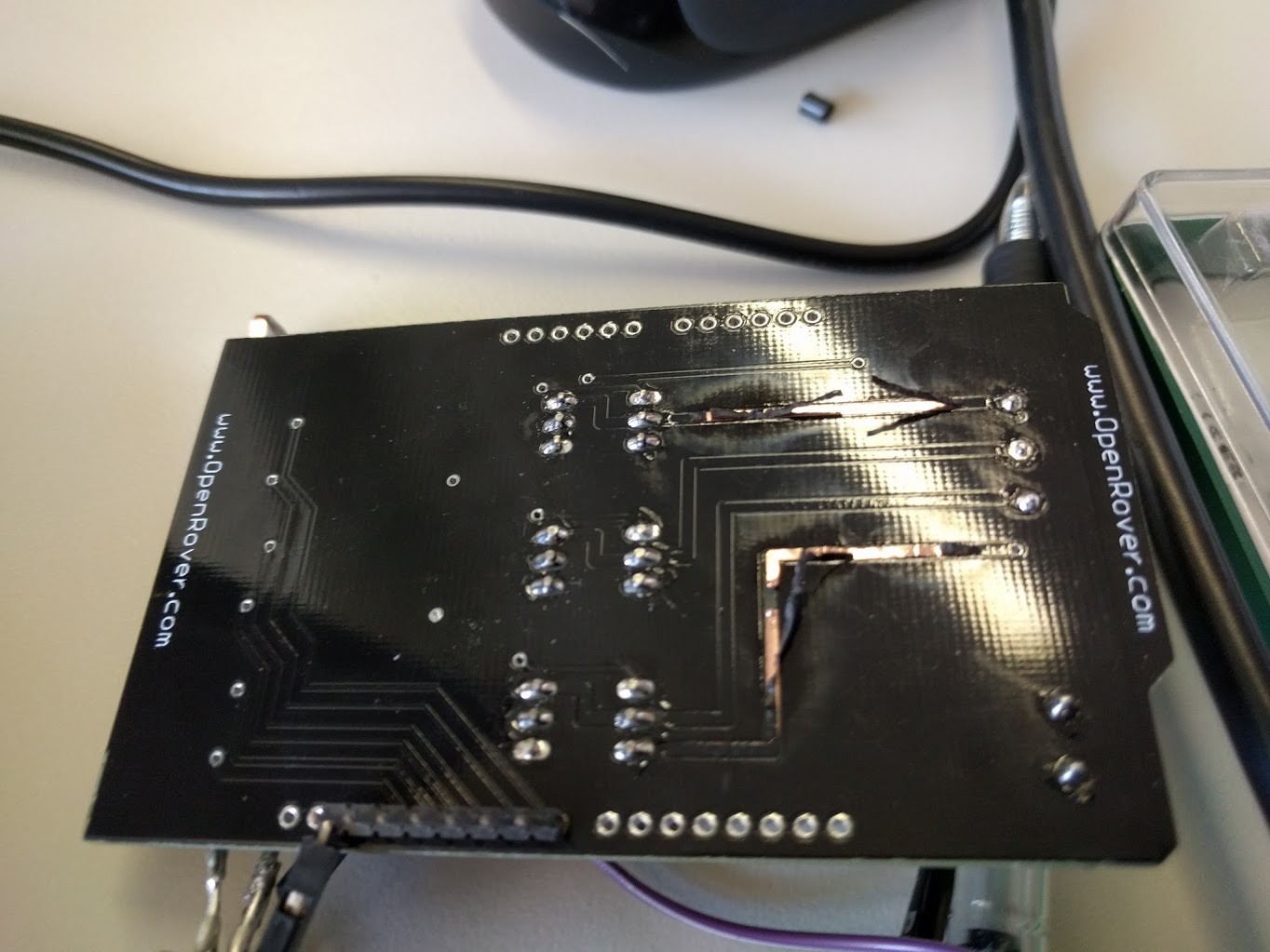
nerd.kingI finally got around to hooking up the battery, board and motor together. I expected fire, smoke and failure and I got it but not in the manner that I expected. I thought that the fets would fail because they have been the failure points in the past but this time I got smoke it was the traces on the board that basically vaporized. I did a very bad job of calculating the trace width for the current requirements.
So I have relaid the board out, using d-pak Fets this time with 3 on top and 3 on the bottom. But it is looks quite odd. I have been thinking about breaking the boards apart and into a different form factor because I have been looking at Cortex M7 boards which could run more than one motor at a time. The main reason for this is that they have ethernet built into them and implementing ROS 2.0 with this boards could be more straight forward than an arduino and possible cheaper.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.