 nerd.king
nerd.kingSo as a result of the change in processors, I have changed the BLDC controller design. This work has been a extrapolation from OpenBLDC, which was my HaD Prize 2014 entry. The design is that the Nucleo will plug into a shield but this will have two sets of drivers on it and no Field Effect Transistors(FETs). The 6 Fets will be broken out into a smaller board and the control/sensor/voltage lines will be run back to the shield. This also allows for a modular approach and if enough IO is available we might be able to run 4 motors from one Nucleo.
I have finished laying out the FET board and I am working on the Nucleo shield(looking for Eagle Libraries for the nucleo_f767zi board) I used dirtypcb for the first time around and it seemed to work great. Even though the FET boards are small it was pretty hard to get large polygon pours. Even with all that work, I am still not a 100% sure I have met all of my current needs.
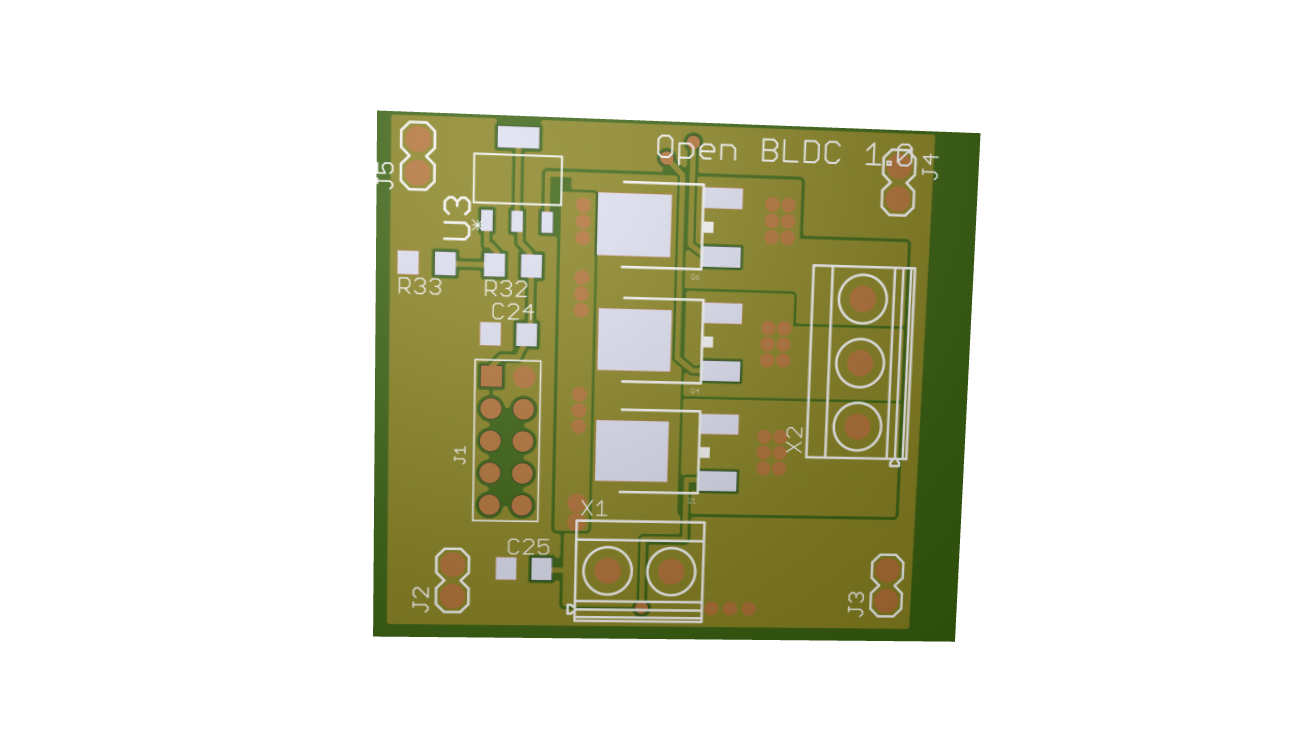
Here is a screen shot of the board, all of the schematics, layout and gerbers have been committed to github. This online viewer never gets the drill file correct.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.