 Alvaro Ferrán Cifuentes
Alvaro Ferrán CifuentesAs we mentioned previously, the brains of the robot is an arduino board. While very convenient to program, and so to share, it needs at least two H-bridges to drive the motors which can't be plugged into the board.
The first thing, after measuring the motor's current requirements and selecting the correct driver, is to connect everything into a breadboard to ensure everything works properly.
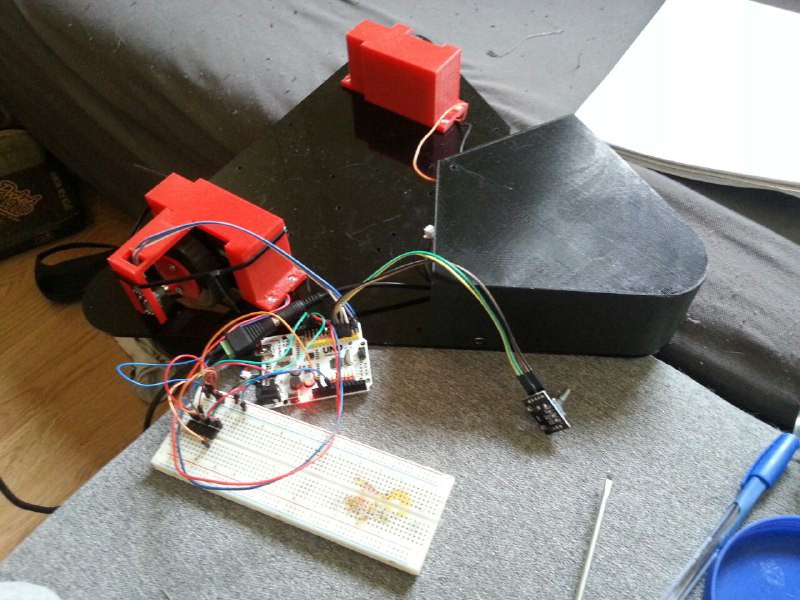
After the first run, both boards slid off the robot and disconnected, so obviously that wouldn't work and we had to move on to a prototype board.
Here we can see the shield with the double H-bridge ic, power jack, motor cables and all the broken-out pins for the encoders, ultrasonic sensors and bluetooth. We also added a couple of velcro strips to secure the assembly in place.
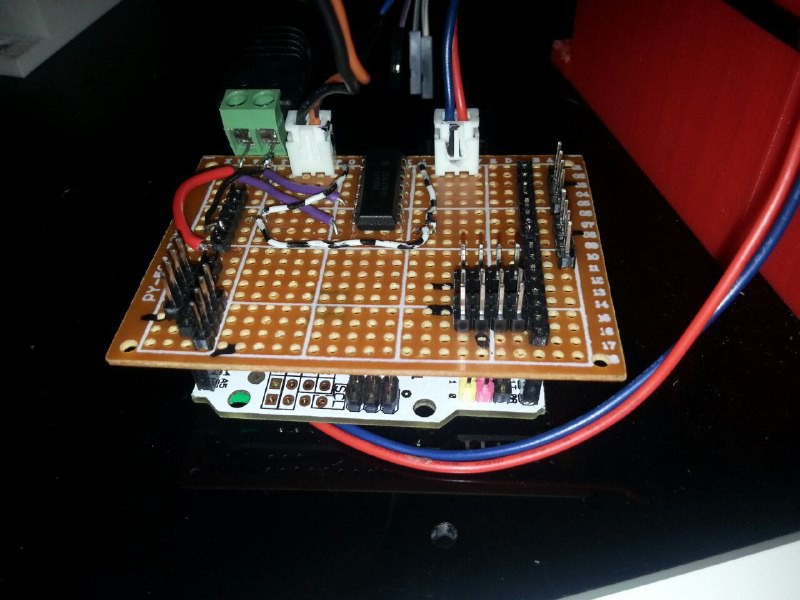
After a couple of days of work the bootloader got corrupted when uploading and we had to make a small cut in the shield to gain access to the ICSP header to fix the problem.
If no more problems arise, all of this will be taken into consideration when designing the final PCB.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.