 Madaeon
MadaeonHow did the project start?
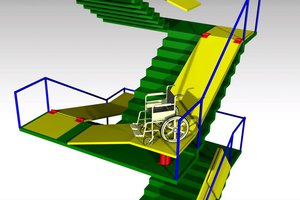
The project stems from a discussion with some visitors of a fair dedicated to consumer electronics in which some solutions for people with disabilities in the lower limbs were presented. Some of them have expressed the need to overcome small architectural obstacles that they encounter in daily life, such as steps, side walks, platforms for the climb in public transport, maybe climbing stairs. Others have expressed the difficulty in reaching, by sitting on the wheelchair, higher top shelves and shelves, in an autonomous way. Our team has also studied the autonomy of commercially available solutions, and if intelligent systems already exist and are able to optimize locomotion based on the type of terrain.
Who are the potential users?
The potential users of the AWAD system are people with disabilities in the lower limbs who want a higher degree of mobility compared to the solutions currently available on the market. They are looking for a product that contains cutting-edge technology, with a clean and modern design, and they want the product to be able to bring them as close as possible to the range of freedom of movement that a person without disabilities can experience. Climb the stairs, overcome obstacles up to 15cm high, be able to turn in place, go up and down to reach points higher or lower than their current position. Potential users expect a degree of autonomy and freedom of movement with greater autonomy and an intuitive control system. They also want a safe product, that through an intelligent management of energy and status monitoring, will never let the user to be stuck in unwanted situations without help.

 Anteneh Gashaw
Anteneh Gashaw
 Julien OUDIN
Julien OUDIN
 Supplyframe DesignLab
Supplyframe DesignLab
Why is the user "seated"? Is it "center of gravity" issues? I would prefer to be in an upright position, to interact normally with others and to put weight on my legs and feet, rather than my buttocks. Standing position is more healthy. As long as you are designing something new, think outside of the "chair"?