 bram
bramEncoderLib is a library to handle a rotary encoder in MicroPython.
Functions:
encoder(clk, dt)
The encoder function initializes the library and it takes two parameters:
1. clk = pin number clk pin
2. dt = pin number dt pin
Example:
e = encoderLib.encoder(clk, dt)
getValue()
The getValue function returns the current rotary location.
example:
import encoderLib
last = 0
e = encoderLib.encoder(12, 13) # Initializes the library with pin CLK on 12 and pin DT on 13
while True: # Infinite loop
value = e.getValue() # Get rotary encoder value
if value != last: # If there is a new value do
last = value
print(value) # In this case it prints the value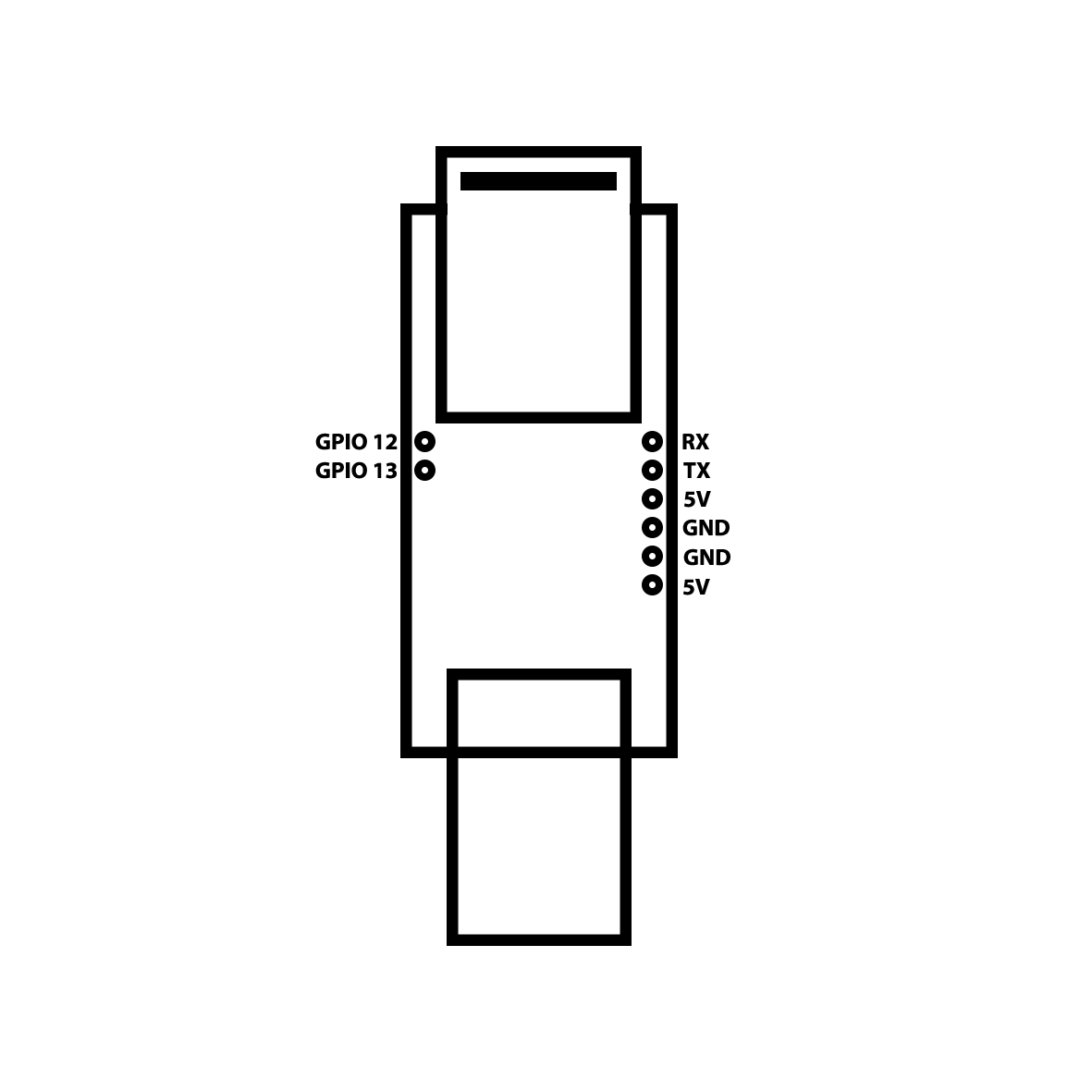 This board is perfect for this project because every necessary connection is available. On board is a bootloader button but I connected another button to is so I could access it without opening the case. The rotary encoder used in this project is a simple breakout from china like
This board is perfect for this project because every necessary connection is available. On board is a bootloader button but I connected another button to is so I could access it without opening the case. The rotary encoder used in this project is a simple breakout from china like 


 JP Gleyzes
JP Gleyzes
 Alastair Young
Alastair Young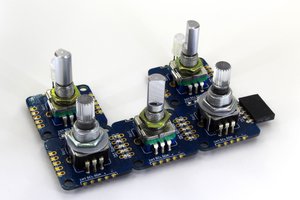
 Saimon
Saimon
 Giulio Pons
Giulio Pons
Nice to see a new library! Have you considered making the code pep8-compliant, so that it fits the rest of the python libraries better?
Also, perhaps using pin interrupts would make it more robust?