 Queadlunn
Queadlunn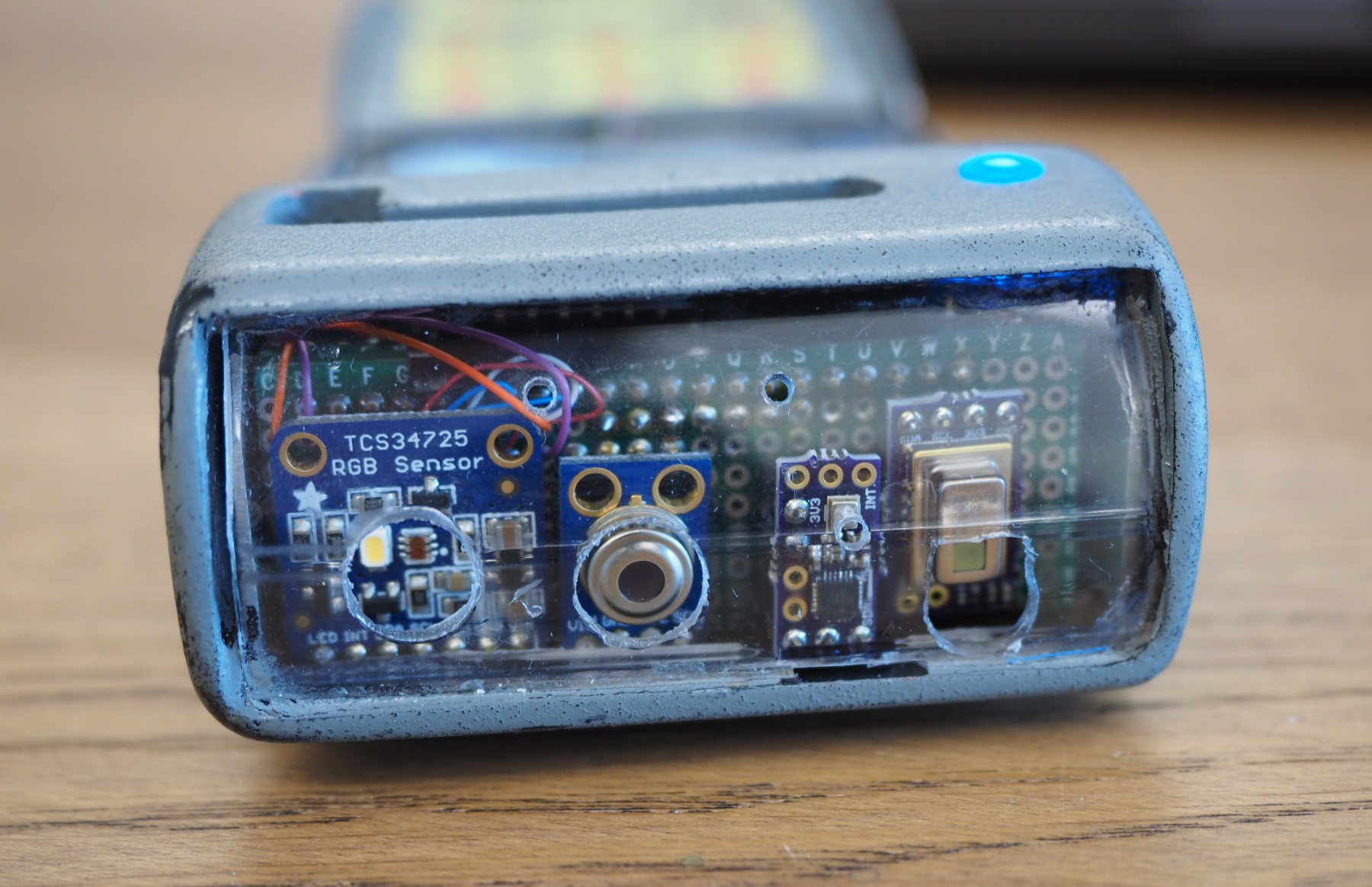
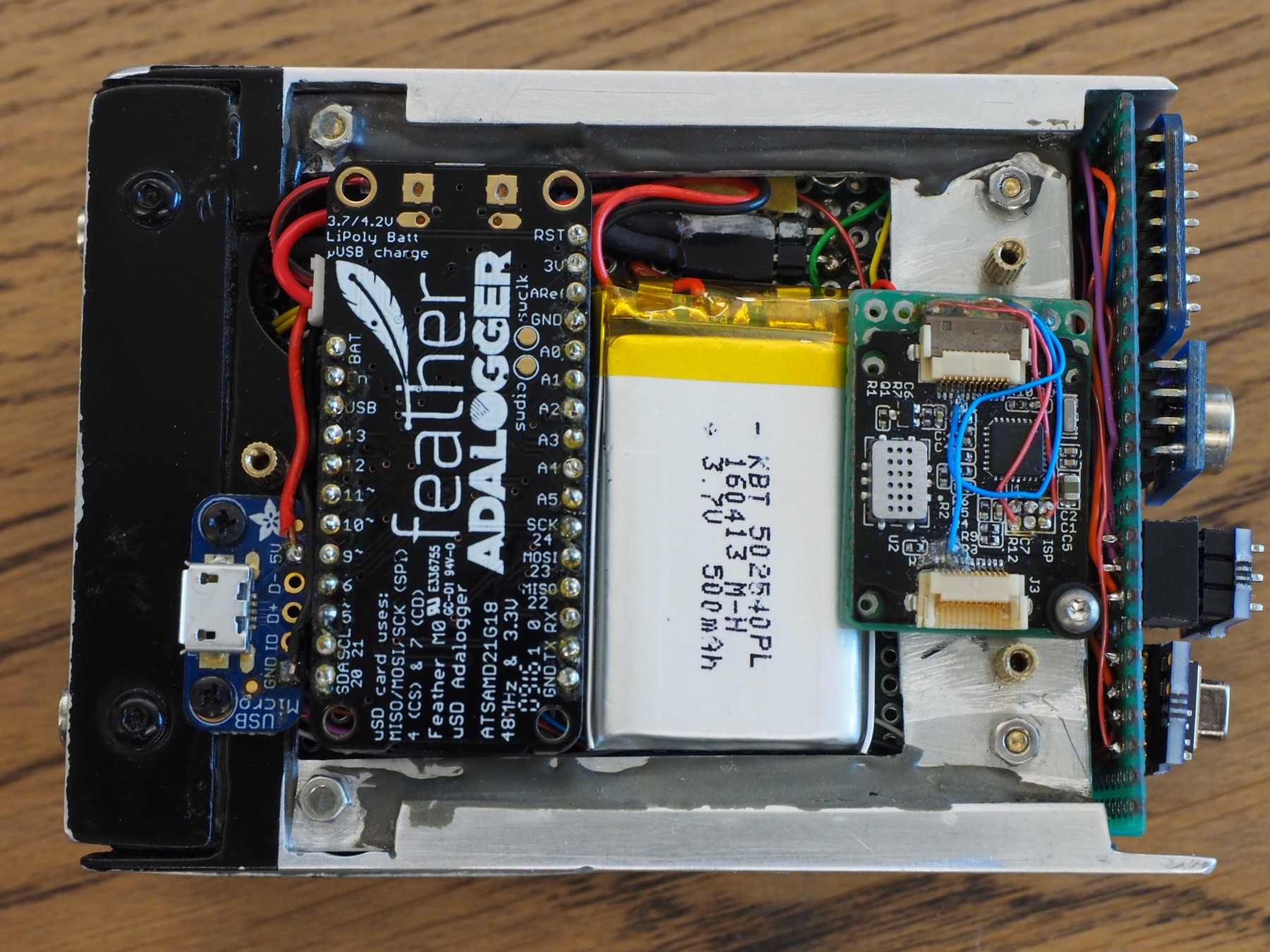
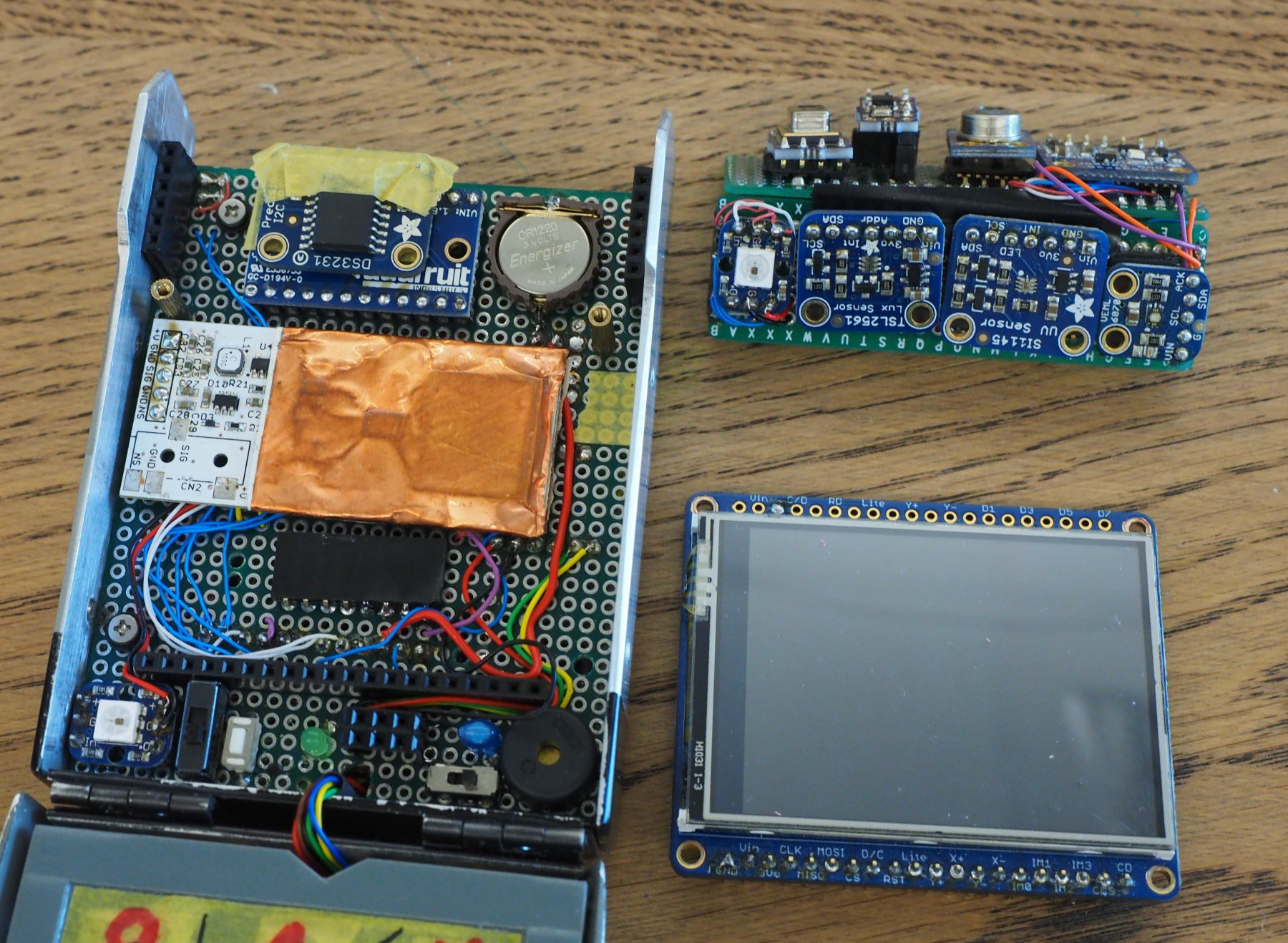
In the past year the external appearance of the unit hasn’t changed much, it’s all been internal hardware and code changes. As the photos show, the mainboard is getting to be a rat’s-nest of wiring with all of the changes and adaptation that I’ve done. The code, actually, is a lot cleaner than when I was at the same point last year. It’s able to do a fair bit more but isn’t using much more of the Arduino’s (Adafruit Feather M0 Adalogger) memory (still hovering around 30% at this point).
The sensors in the unit haven’t changed a huge deal, I’ve gotten them to work a bit better though and have even been able to adapt the libraries for the Gas sensor to work with the M0 controller (more brute-force really but it works). The total sensor list is posted below.

At the moment I’ve gotten 2 replacement sensor part. One to replace the Grideye sensor so it’s smaller (I can’t do surface-mount soldering yet) and one to replace both the atmospheric sensor board and the 9-depth-of-field sensor board that captures movement. The second will combine both the ATM and 9-DOF into one very small package, saving on the limited internal space within the Tricorder.
There are a few things I want to add into the unit so far: GPS (for both location data and accurate clock updates), Haptics (feedback from button presses, sensor alarms), and finding a replacement and higher quality display are my biggest. The largest hurtle right now is getting the code solid, using the display to give clear and accurate readouts of the sensor data, and eventually rebuilding the mainboard and chassis. The chassis’ ABS/aluminum/polycarbonate construction is rock-solid (it’s been hanging out in my camera bag for the last year) but I want to clean it up since the off-square lines in the current one bother me a bit.
My big inspiration for the project has been the Open Source Science Tricorder by Peter Jansen. It’s an incredible project and I have major respect to the creator.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.