 tlankford01
tlankford01Hello all,
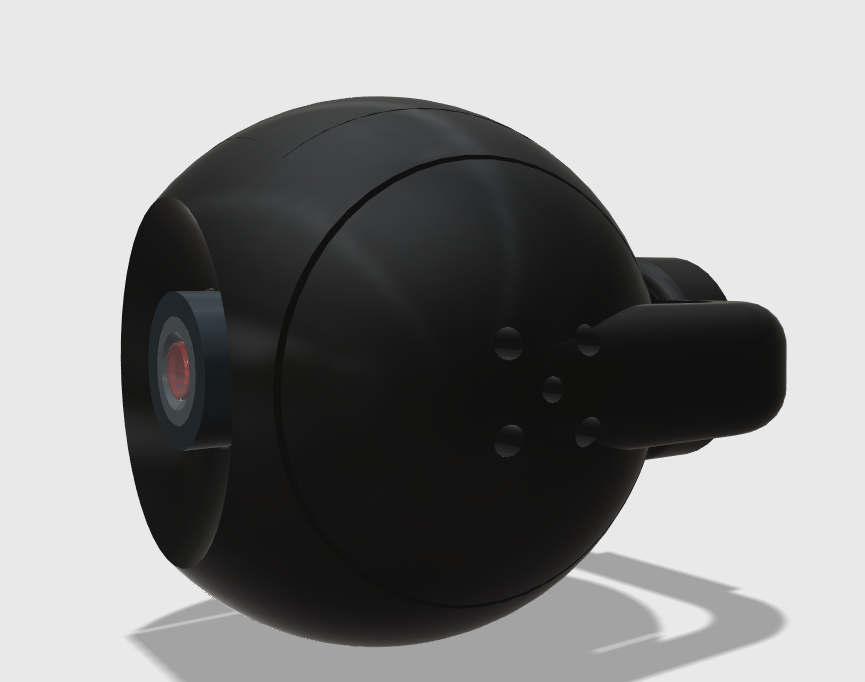
We have been hard at work in the lab and we are ready to share some of the gimbal work that we are adding. Right now we are mounting to some of our custom designed multirotors for testing. The camera gimbal will be a product. The plane is a one off for now but we will be working on more of those as we get closer to a complete system.
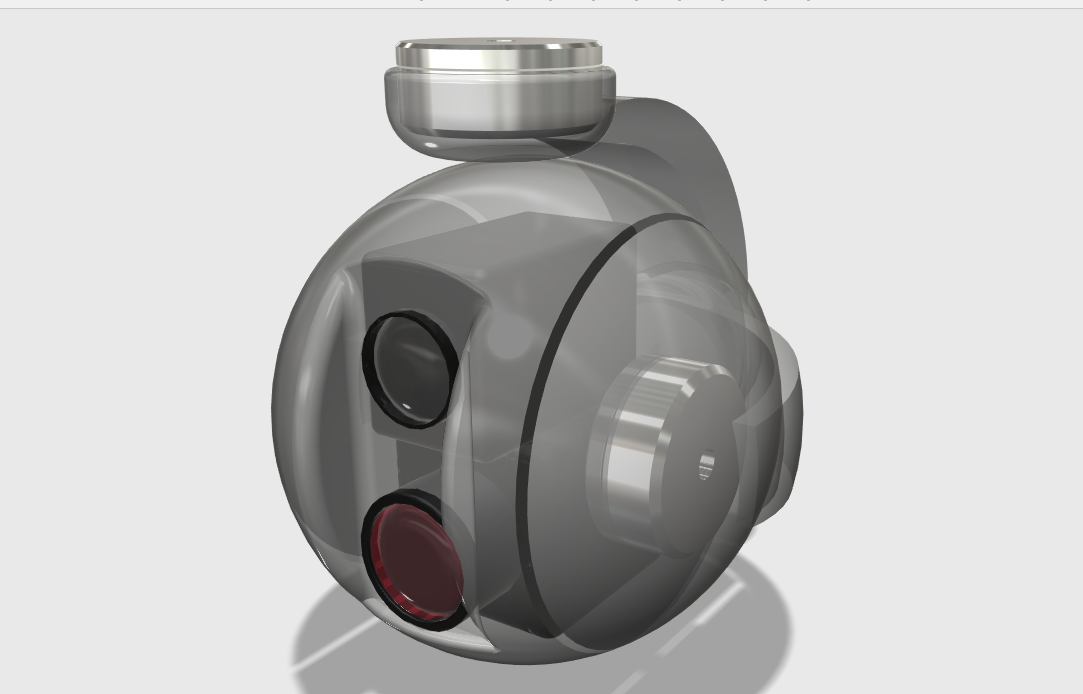
We are using multiple vision systems in our effort to create an anti-poaching system. We have been working with machine vision and i will add a project log when we have it implemented with this new camera. We are using an experimental camera core. It is a 640 x 480 line resolution thermal imaging camera with a 160 degree field of view. The FOV and clarity of the image are unprecedented in a thermal imaging system. We have modeled the thermal only camera as we are still waiting on our 20x zoom 4k camera to come in. The total setup will look like the second render and be mounted in 3 axis and 2 axis setups.
I have some images of the setup being tested on our LOKI 4G project. Please feel free to look at that project as it is a prime test bed for our anti-poaching and robotic systems.
Thank you again and I will be updating this project page with a video of it all working together by the 29th for our effort to make the top ten in the 2015 Hackaday Prize. We appreciate everyones support in this effort.
Cheers,
Toby

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.