 Tim Wilkinson
Tim WilkinsonArduino code: https://github.com/aanon4/RingNet-Linear-Actuator
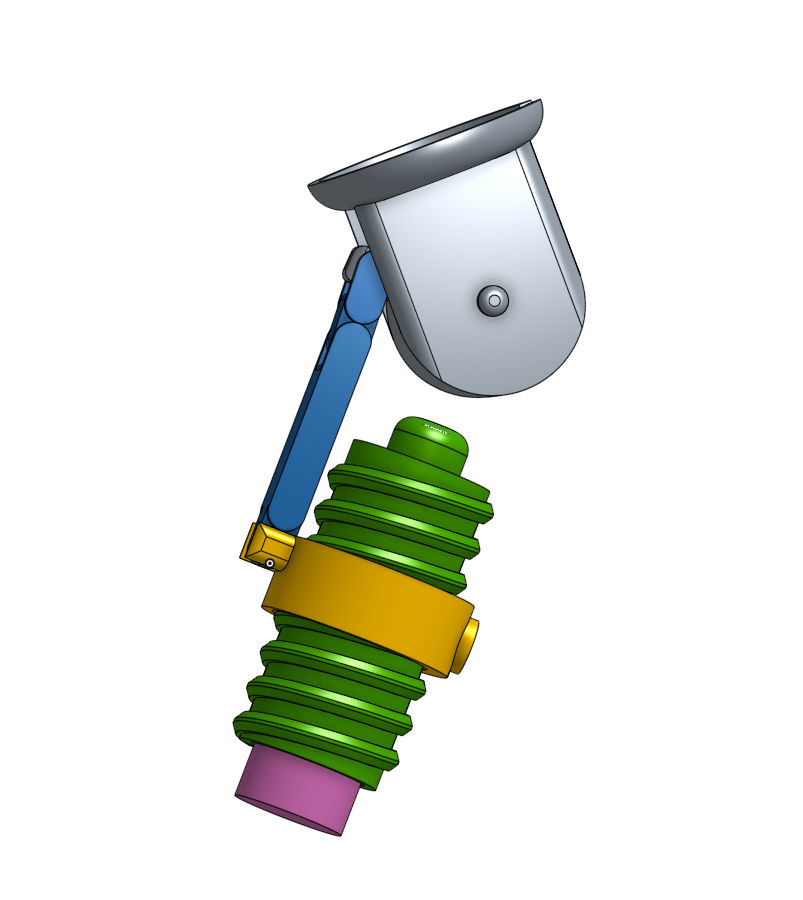
3D design (v1.2): http://bit.ly/2cPuHUa
Original design (v1.0): http://bit.ly/2cyohLp
STL files: https://pinshape.com/items/26163-3d-printed-articulated-joint-v12
Form2: https://github.com/aanon4/RingNet-Linear-Actuator/blob/master/3d/joint.form
Pcbs: https://github.com/aanon4/RingNet-Linear-Actuator/tree/master/pcb








 Brian M. Sweis
Brian M. Sweis

 Lex Kravitz
Lex Kravitz
Cool design. Perhaps I'm missing something, but could the design be simplified by mounting the D shaft of the motor rigidly to the Top, then mount (press-fit or glue) the motor into the Worm?