 Roman V
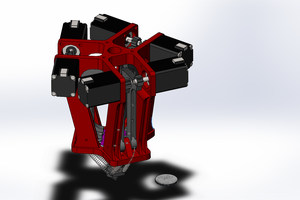
Roman VThis is a spinning top design that uses a Hemispherical Gimbal drive system that has been minimised to fit inside of a hand held toy. The hemisphere will rotate with the outer body. The angular momentum of the spinning top will drive the hemisphere. The Angle that the hemisphere meets the ground will be driven with two micro linear servos and a swashplate (yes, same thing used in helicopters!)

(The above image is a concept drawing I made a few years ago, but hopefully the idea is illustrated enough to get the basic idea)



 David Brown
David Brown
 Dávid Máté
Dávid Máté

 Bree Hoffman
Bree Hoffman
Hello
As it is written in Research Notes (2) , I found a more simple design that need only a small processor and very simple mechanic
With 2 motors , one to turn the external part of the top M1 and one to turn the hemisphere M2
The internal part direction from magnetic earth field is commanded by the remote so we don't need accelerometers. We need 1 gyroscope (optional ) + 1 magnetic fied detector .
There is only one driver for the 2 motors M1 and M2
M1 turn at constant speed
M2 turn at variable speed
In this configuration there is no need to have a gimbal with 2 movements. Just tilt the motor M2 with a servo motor M3
The remote has 2 buttons:
1 st to turn the internal part in the direction that you want to go. ( North East South West)
2 nd to tilt the pivot ( right or left ) so you can go forward or backward.
I want to put a picture but I don't know how to.
Humanspin