 Philip Ian Haasnoot
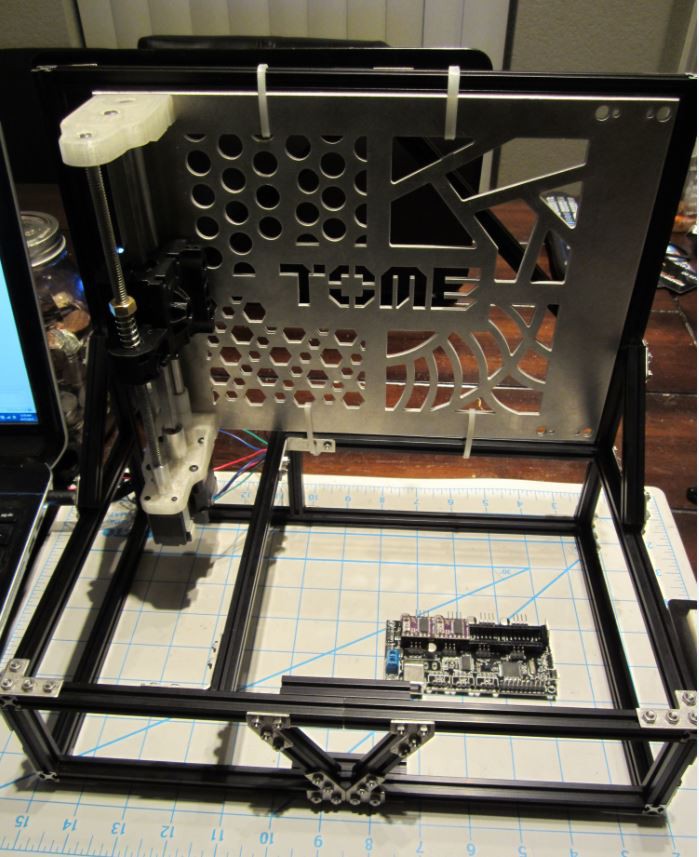
Philip Ian HaasnootI was able to pull myself away from my other projects to give the TOME some love tonight. I've had this makerbeam sitting around for quite some time, generally I use it for quick test stands or supporting rigs for projects that i'm working on. The TOME rear plate will be re-cut in order to attach to the frame properly (Zip ties are temporary). I feel that attaching the backpane assembly to a rigid test fixture will enable us to perfect the mechanism and get great prints. Once we fine tune the motion mechanism we will make the TOME fold, this will help narrow down causality if our print quality degrades once the folding mechanism is instituted.
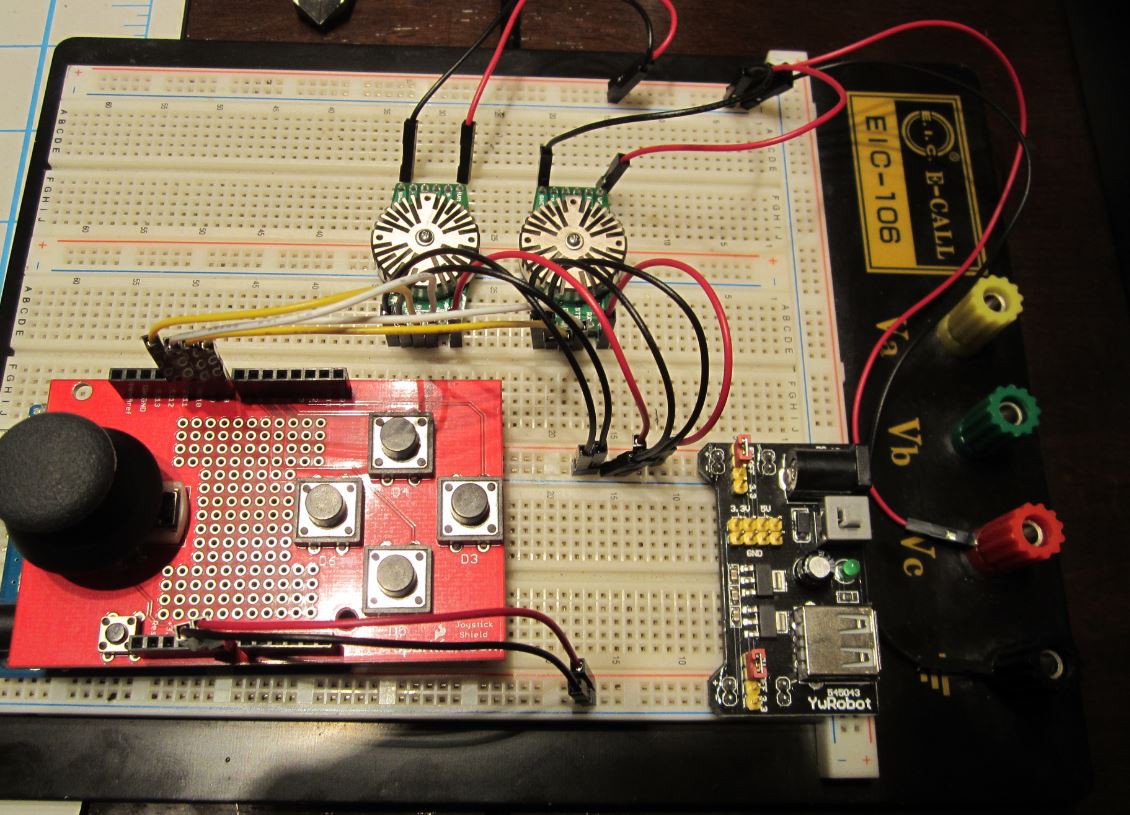
The StepperStack 2's arrived today and are currently wired up on the test board below. We are using an Arduino Uno, with a spare Joystick breakout from Sparkfun to drive the StepperStack 2's. The goal is to have a very rudimentary drive setup just to test the mechanism, the first prototype will then transition over to the Sanguinololu once we are ready to start printing. The goal is to spin our own board for the first portable prototype, for now our effort needs to be focused on finishing the XYZ Drive mechanisms.
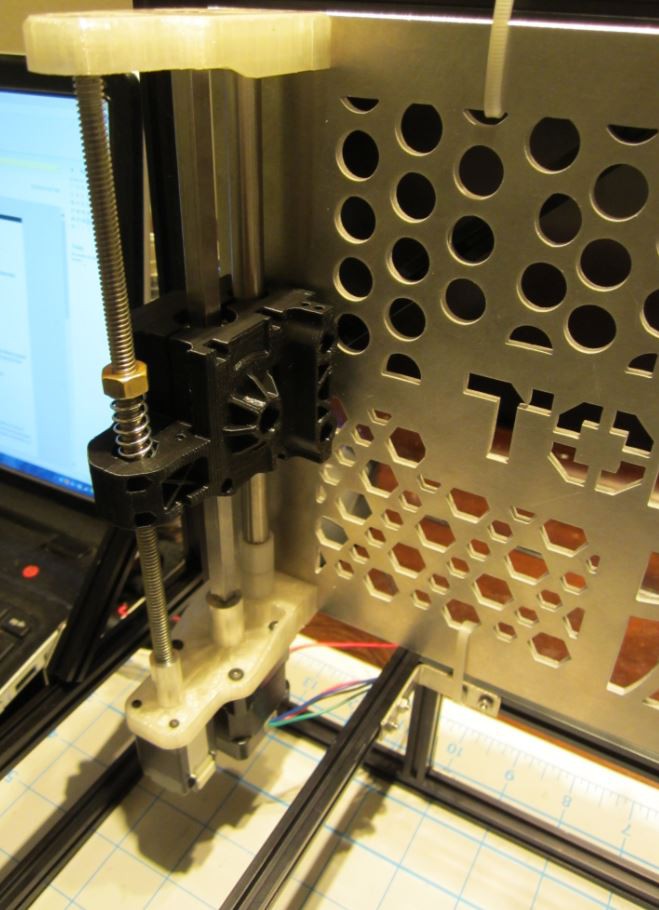
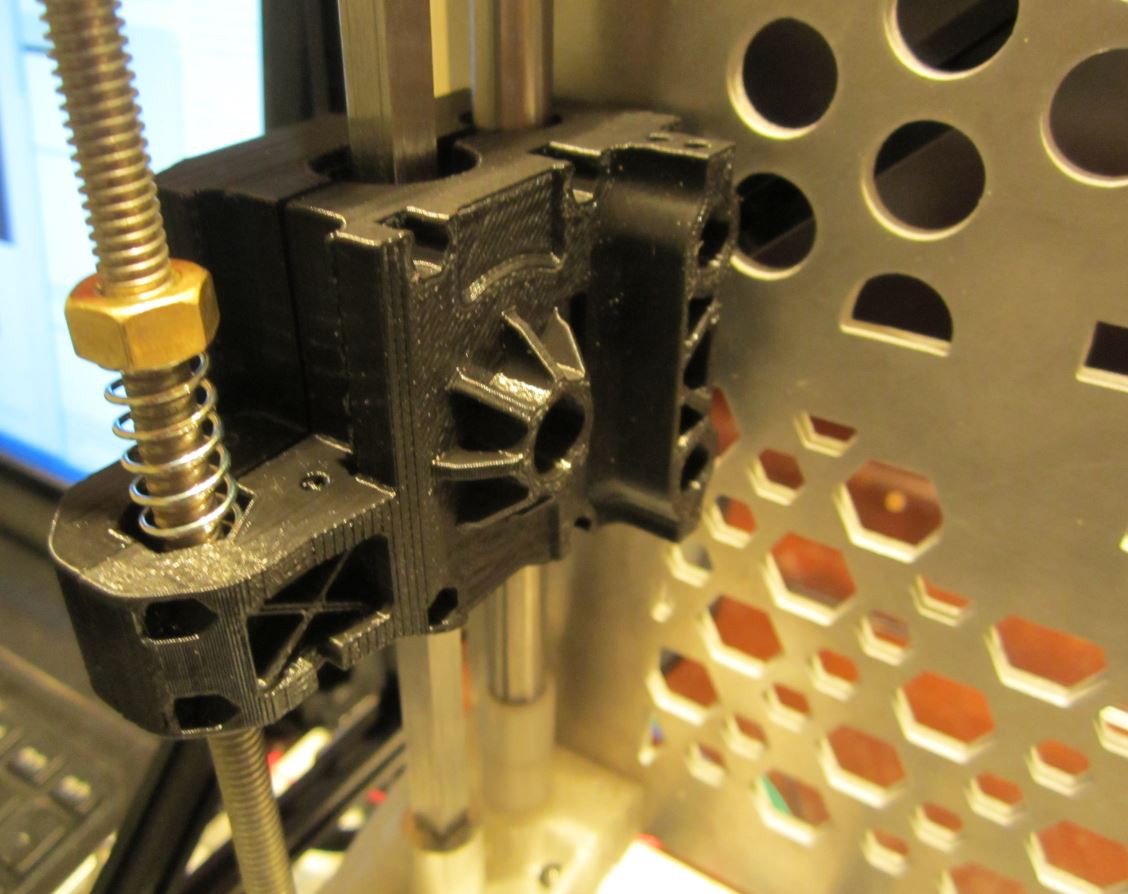
The FDM 3D printer we are using to prototype parts is printing everything undersize, and any hole is oblong making it tricky to get our parts to fit properly. We are discussing SLS printing with a local company here in AZ, if all goes well we will have more accurate parts to work with. Currently you can actuate the Z-axis carriage (with spindle installed) by turning the Z-axis lead screw, however due to tolerance issues caused by the 3D printer we are using we cannot spin the X-axis spindle just yet. I'm going to adjust the spindle model to give us some clearance just for this test print so we can get one half of the drive mechanism moving under power. Stay tuned!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.