 borazslo
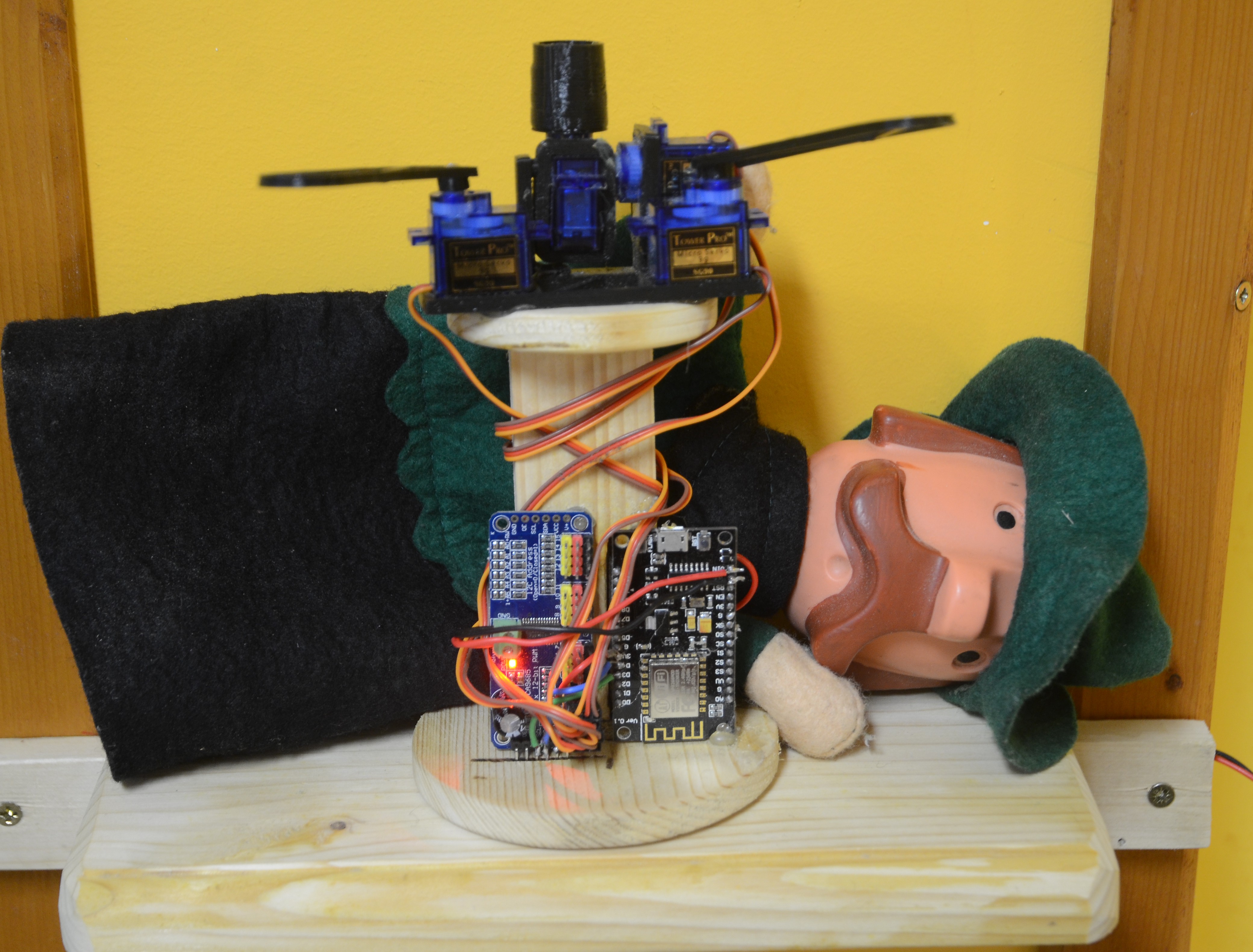
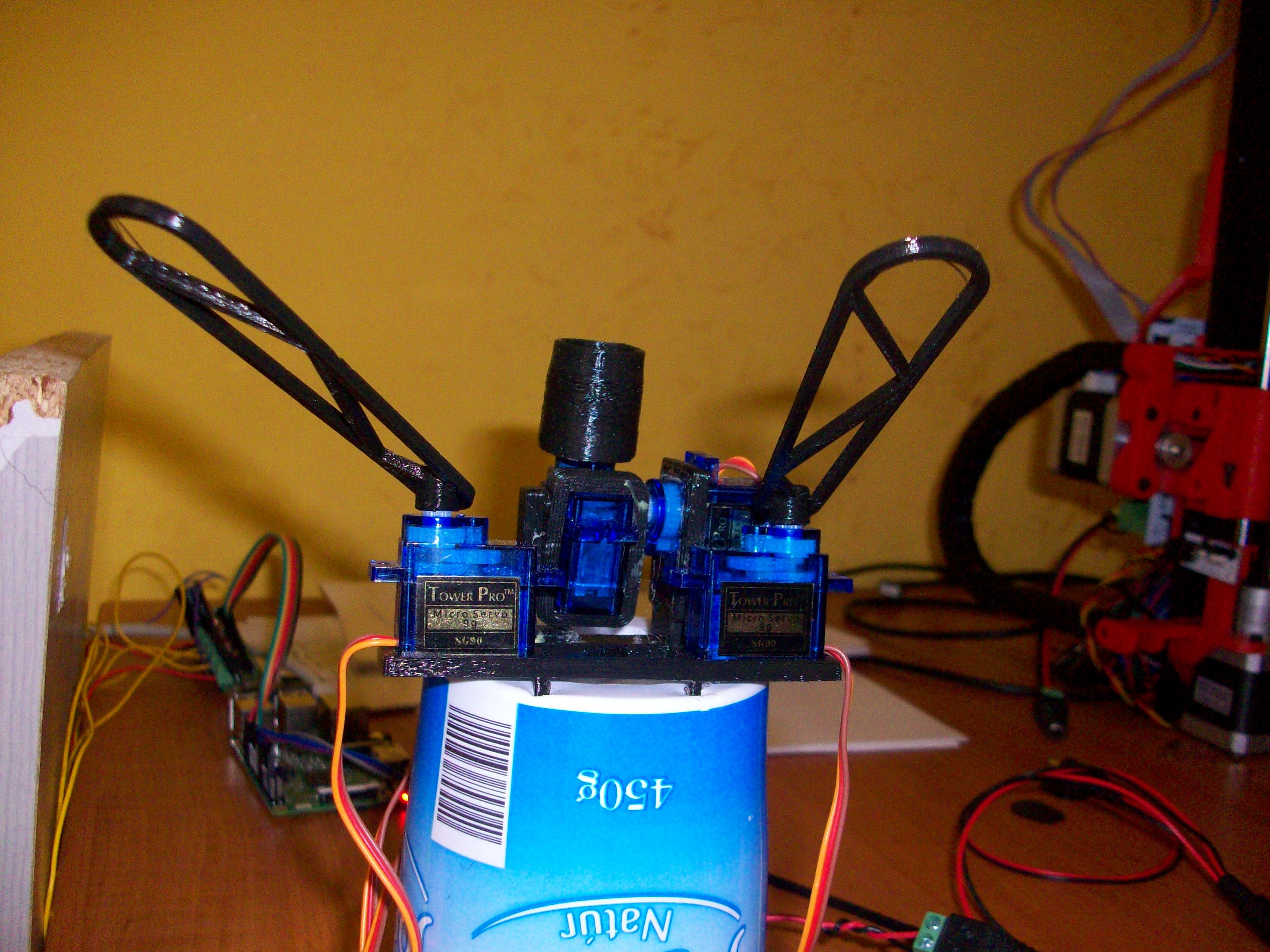
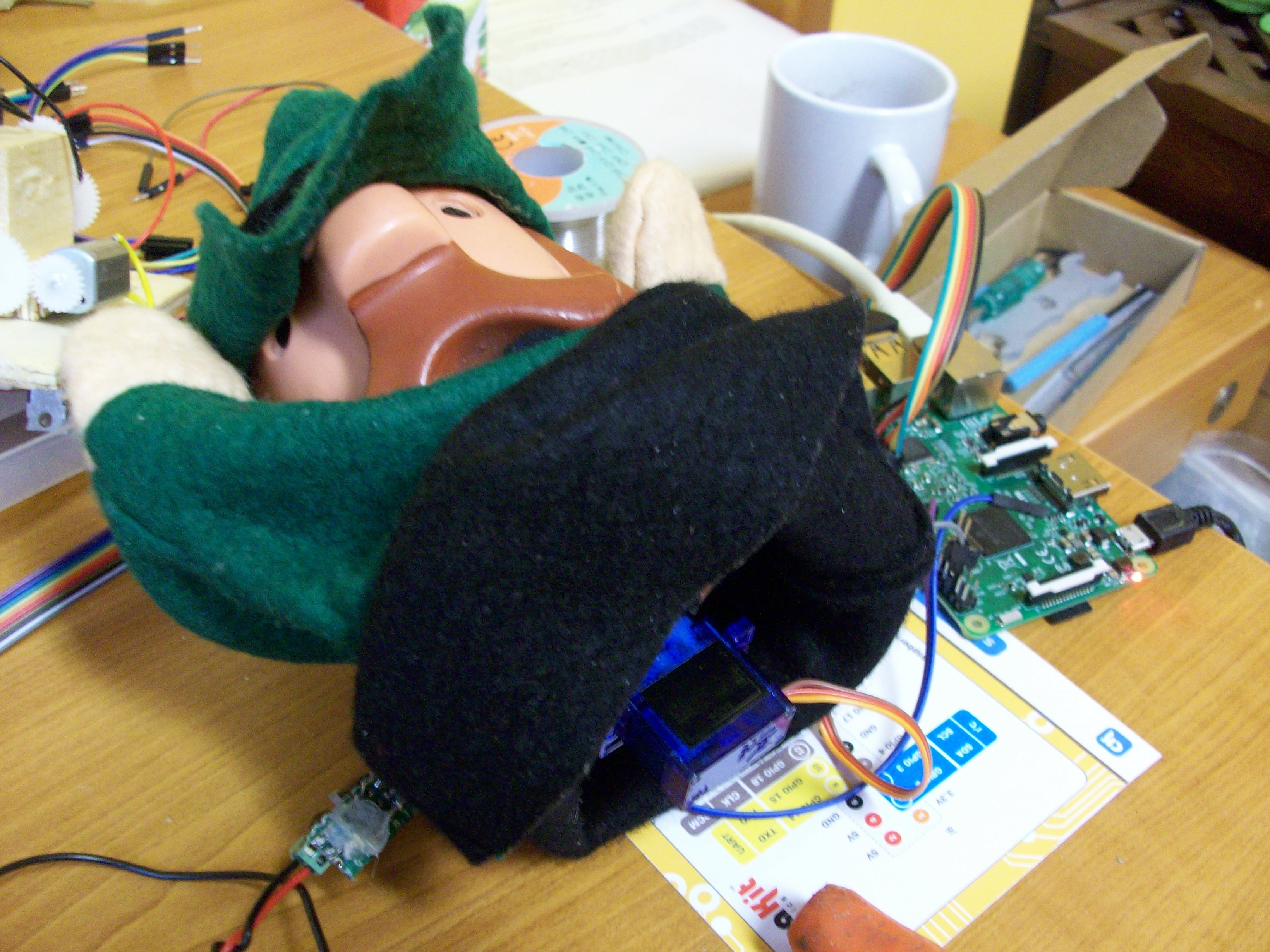
borazsloThe brain of my handpuppet will be Raspberry Pi instead of an arduino, as I have no arduino. Small SG90 micro servos will make him move. These servos need for PWM, but I have only PigPio. I have a Prusa i3 Hephestos 3D printer, so I can print small parts I need.
0%
0%
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests






 1. Mechanics
1. Mechanics 2. Electronics
2. Electronics
 Will Donaldson
Will Donaldson
 Smalls
Smalls
 Vaneh Boghosian
Vaneh Boghosian
 deʃhipu
deʃhipu