 borazslo
borazsloNext step to make Balambér's arms to move. First I planned an arm with moving shoulder and elbow. I was thinking about a parallel (but crossed) mechanism. (Thank you @Radomir Dopieralski.) Finally I made a design with two axis but one servo only.
Then I realized that the more simple is the better. So I designed the arms:
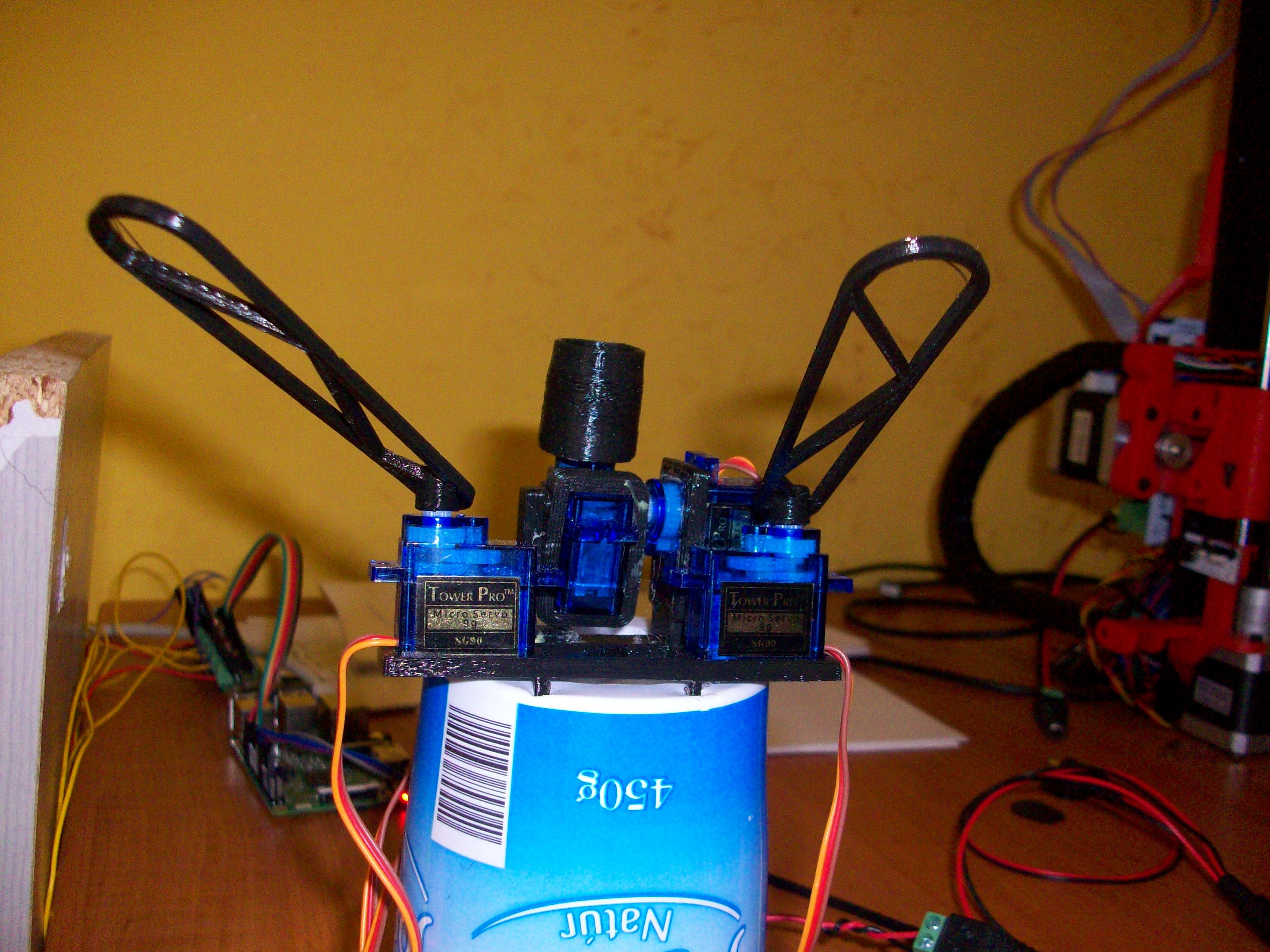
So Balambér has two arms now, even though he has a chest missing:

Because of the four servos the new code a little bit more complex. Only a little bit:
import time
import pigpio
import sys
pi = pigpio.pi()
GPIONeckHor= 24
NeckHorMin = 1100
NeckHorMid = 1500
NeckHorMax = 2100
GPIONeckVer = 27
NeckVerMin= 1900
NeckVerMid = 2200
NeckVerMax = 2300
GPIORightHand = 22
RightHandMin = 1000
RightHandMid = 1050
RightHandMax = 2000
GPIOLeftHand = 23
LeftHandMin = 1000
LeftHandMid = 2000
LeftHandMax = 2100
speed = 0.005
def shake(gpio,min,mid,max):
for x in xrange(mid, min, -10):
pi.set_servo_pulsewidth(gpio,x)
time.sleep(speed)
pass
for x in xrange(min,max,10):
pi.set_servo_pulsewidth(gpio, x)
time.sleep(speed)
pass
for x in xrange(max,mid,-10):
pi.set_servo_pulsewidth(gpio, x)
time.sleep(speed)
pass
pass
if len(sys.argv) > 1:
command = sys.argv[1]
if command == "-h" or command == "--help":
print "Example: no, yes, right, left"
sys.exit()
#SET command
elif command == "no":
shake(GPIONeckHor,NeckHorMin,NeckHorMid,NeckHorMax)
elif command == "yes":
shake(GPIONeckVer,NeckVerMin,NeckVerMid,NeckVerMax)
elif command == "right":
shake(GPIORightHand,RightHandMin,RightHandMid,RightHandMax)
elif command == "left":
pi.set_servo_pulsewidth(GPIONeckVer, NeckVerMid)
shake(GPIOLeftHand,LeftHandMin,LeftHandMid,LeftHandMax)
else:
error("Invalid command")
else:
print "Arguments needed"
pi.set_servo_pulsewidth(GPIONeckVer, 0)
pi.set_servo_pulsewidth(GPIONeckHor, 0)
pi.set_servo_pulsewidth(GPIOLeftHand, 0)
pi.set_servo_pulsewidth(GPIORightHand, 0)And a short video about the movement of Balambér:
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.