 Kevin
KevinFirst of all, lets learn some words so we know what the heck I'm talking about:
- FPV: First Person Video
- PWM: Pulse Width Modulation (Its a signal that controls the speed of a motor)
- ESC: Electronic Speed Controller (These guys take the PWM signal and use it to control the motors)
- IMU: ??? (A board with an accelerometer, gyroscope, compass, and maybe altitude sensor)
Goals:
The original goal was to make a drone out of standard FPV racing parts and to replace the control board with a Raspberry Pi and IMU. This has proven to be much more difficult then I previously anticipated. Nevertheless I'm slowly pushing onward and someday I'm gonna get this dang thing in the air.
For now here are the major stepping stones in this project:
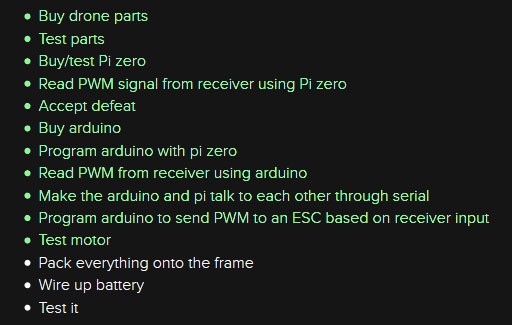
Now at this point I should have a complete working drone but I didn't use a Pi zero for nothing. Here are the things I plan to do afterwards. Keep in mind some of these things are pretty advanced. I'm not sure how far I'll get but I gotta try.
- Buy IMU
- Program IMU to modify PWM
- Create some kind of machine learning program to recognize flight patterns
- Buy Pi camera to record FPV
- Setup slow motion for awesome slow-mo shots
- Add WiFi dongle to Pi
- Connect Pi to phone to quickly adjust settings
- Use camera for computer vision
Everything you seen in green is already completed. Currently I am gathering all my old photos, notes, code, etc. and soon I will be posting a great big update log to get this project page up to speed.
 julien
julien
 TK
TK
 Davidian
Davidian
for flight pattern recognition, using tensorflow might help