 Nelson Phillips
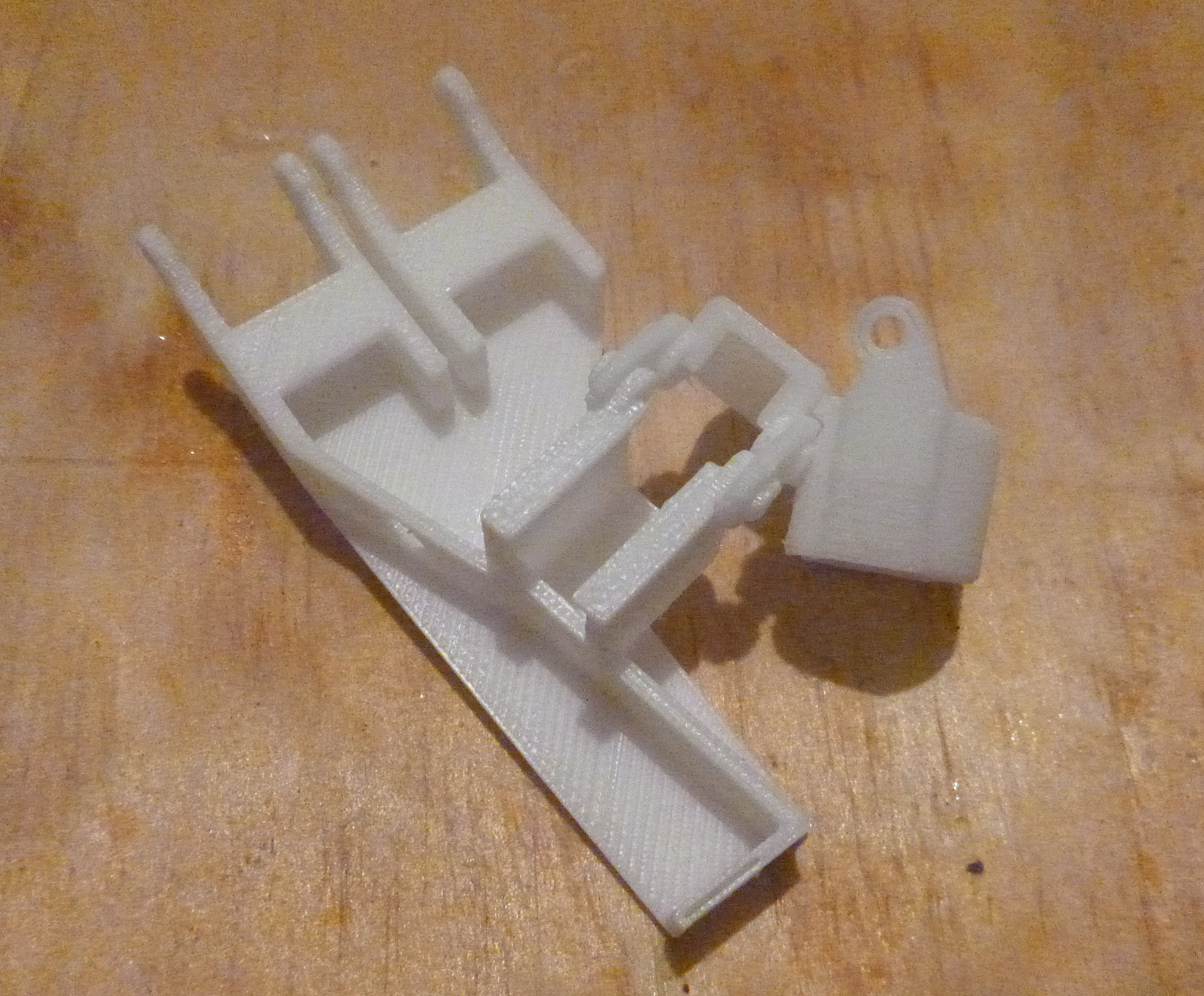
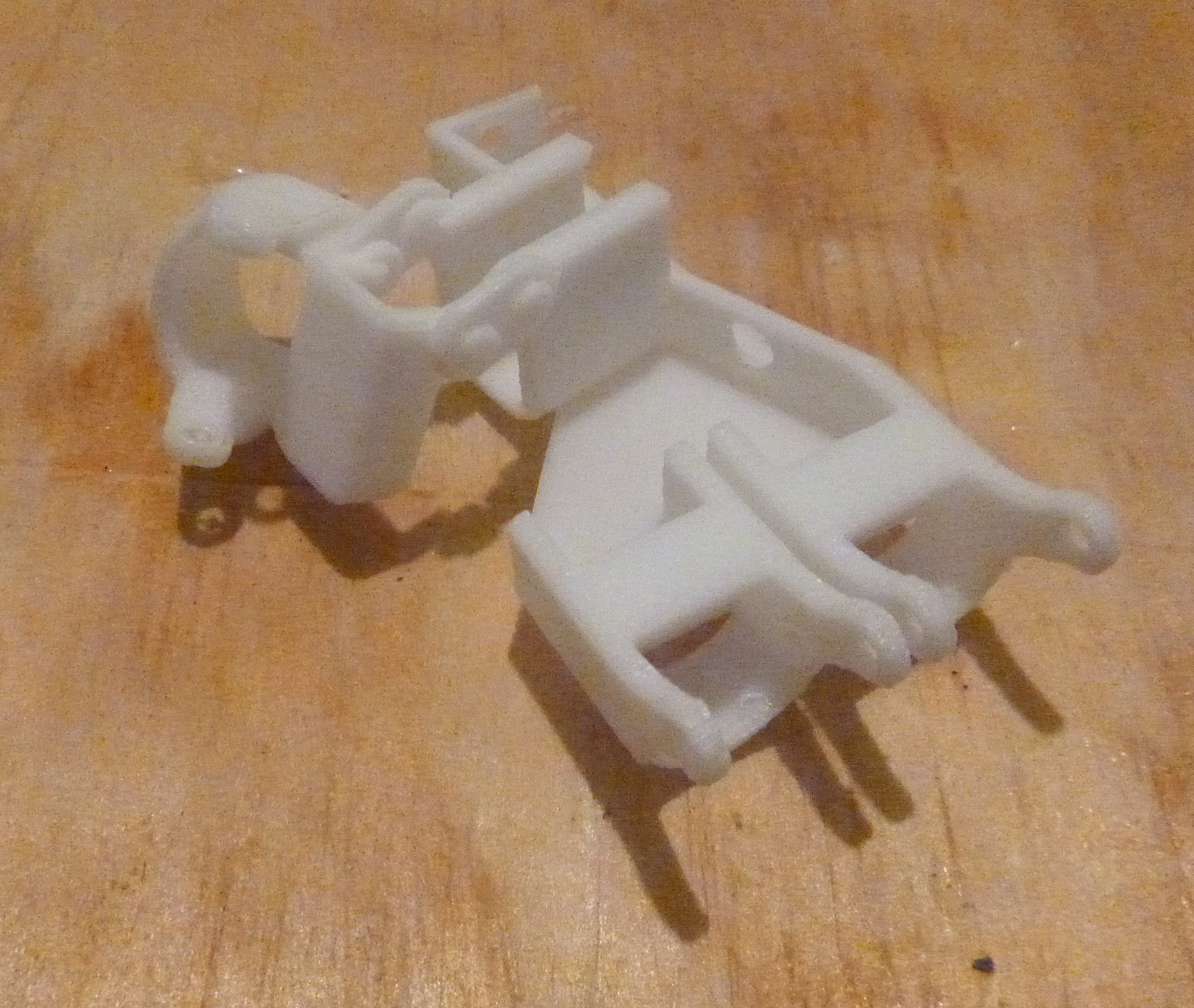
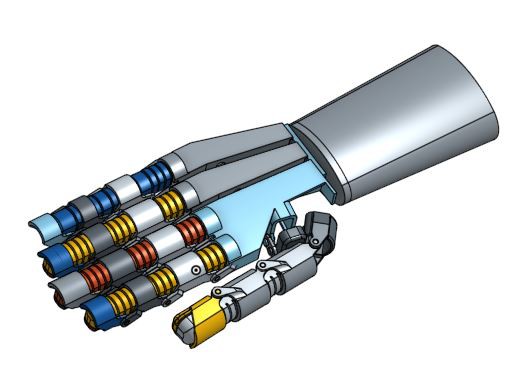
Nelson PhillipsThe thumb is a clearly an important component of hand function the two fingers and thumb picture below shows an early solution. It revealed that there requires an angle on the apposing joint and the third joint is a difficult to straighten from being parallel to the fingers.

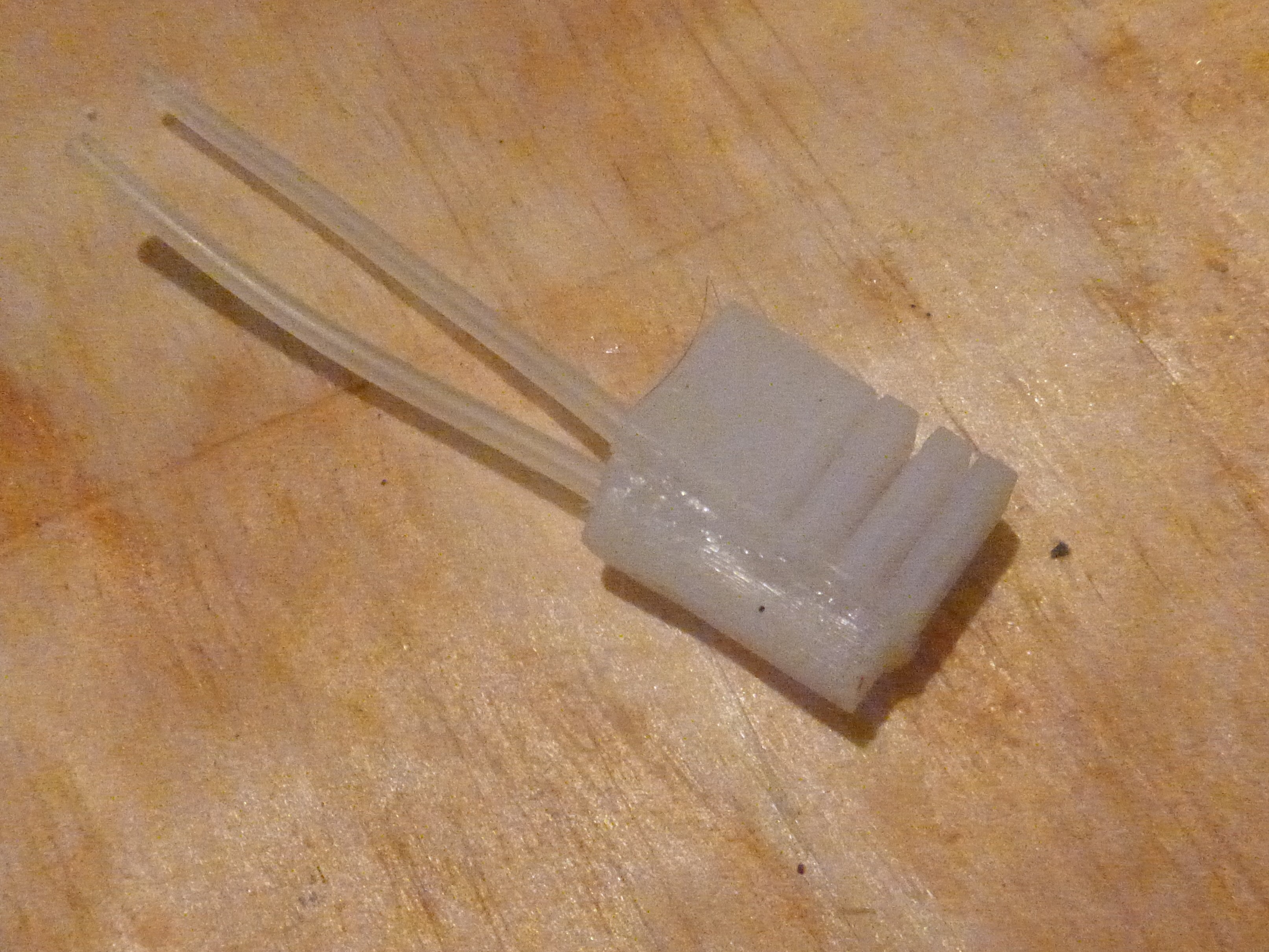
The actuator for the thumb base joint, below, is large and provides the force to keep it stable, using the commonly used, for this project, flexure equation 
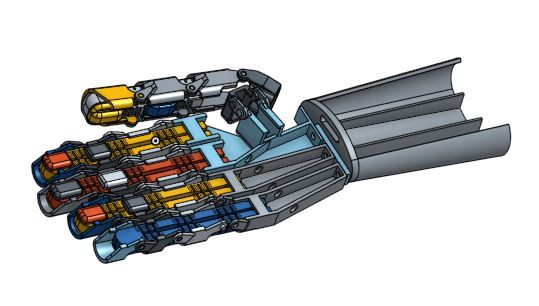
Most of the CAD model has been completed for this stage of the project and requires construction.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.