 Nelson Phillips
Nelson PhillipsAfter the physical hand is completed it needs a proper control interface. This started a few months ago sourcing appropriate components like pump, valves, connectors and pressure sensors. These have now been bread boarded and tested on a test finger.
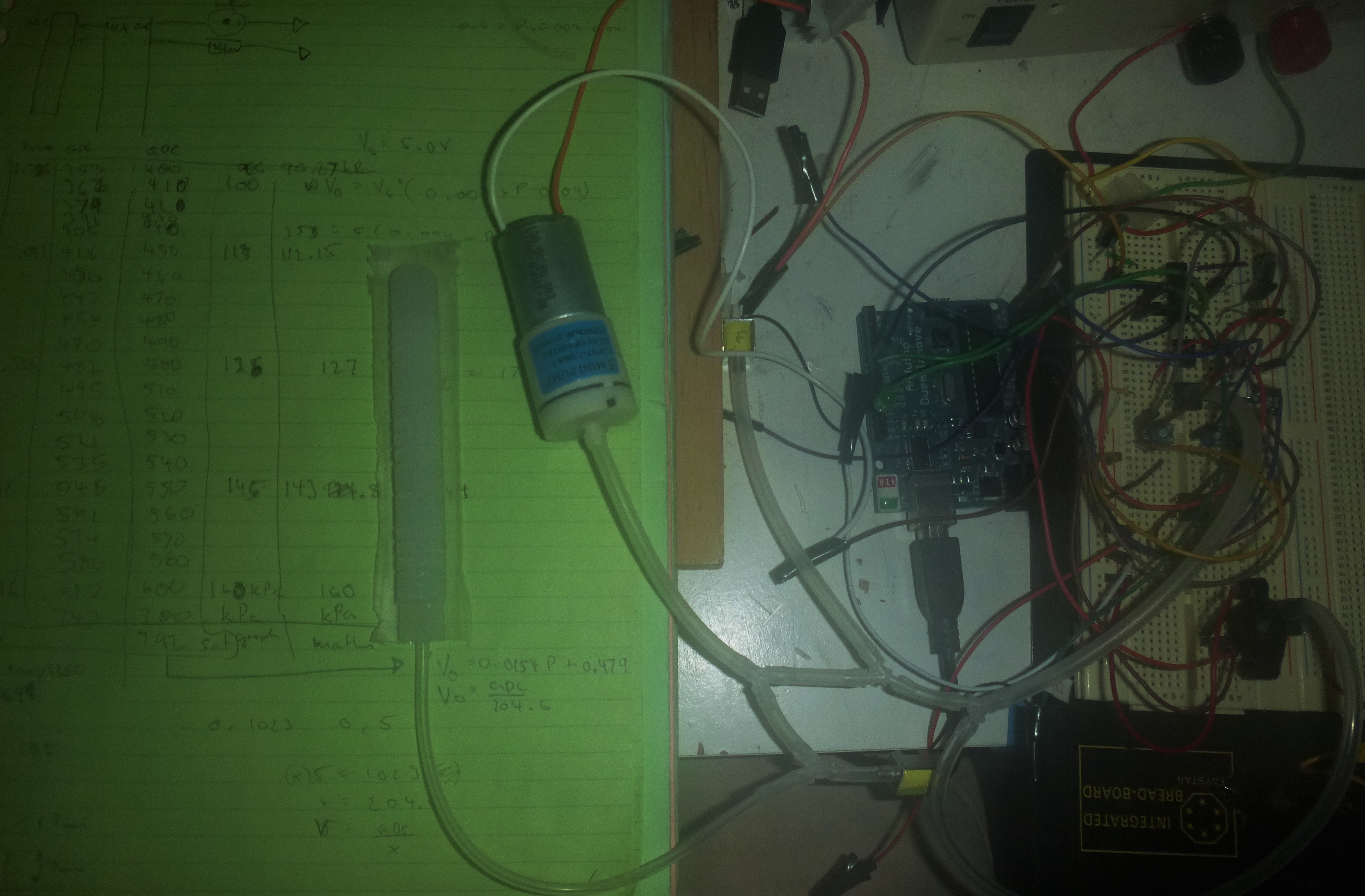
A background on the choices made here has largely to do with cost. A compressed CO2 setup is significantly more costly than the 6V pump and 5V values. The pressure regulation is a issue with the CO2 were as the pump's pressure is regulated via a PWM signal with a pressure sensor in feedback, however there is no reason that the hand cannot be controlled via pressurized CO2.
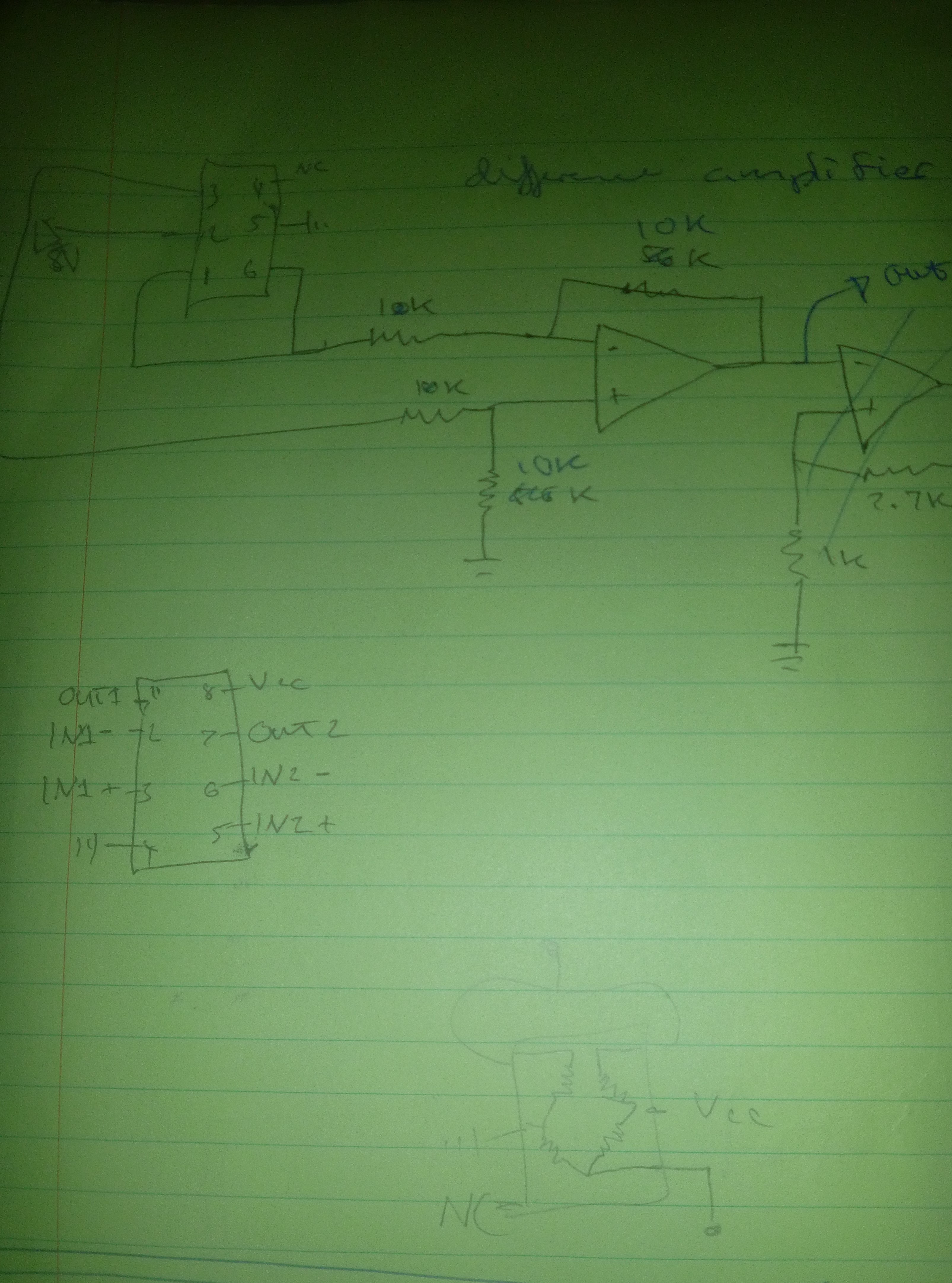
For those playing along at home, the table in the picture was created to configure and calibrate the inexpensive MPS20N0040D-S pressure sensor with a MPX4250AP that has a know pressure to voltage output, but is significantly more expensive. This is in spite of the additional circuitry and amplification. The issue was that the MPS20N0040D-S is essentially a voltage divider with two output that require a difference amplifier, but it was also found that this was enough without additional amplification, the difficult to see diagram at the bottom is the sensor circuit equivalent.
 The values and pump are controlled by a high current Darlington transistor array ULN2003A linked to an Arduino.
The values and pump are controlled by a high current Darlington transistor array ULN2003A linked to an Arduino.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.