 Nelson Phillips
Nelson PhillipsAfter morning the loss of my CNC spindle........ and a bunch of side tracks this project continues.
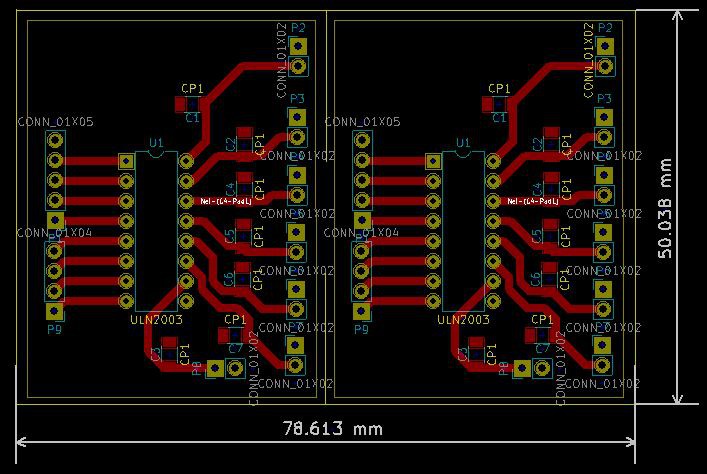
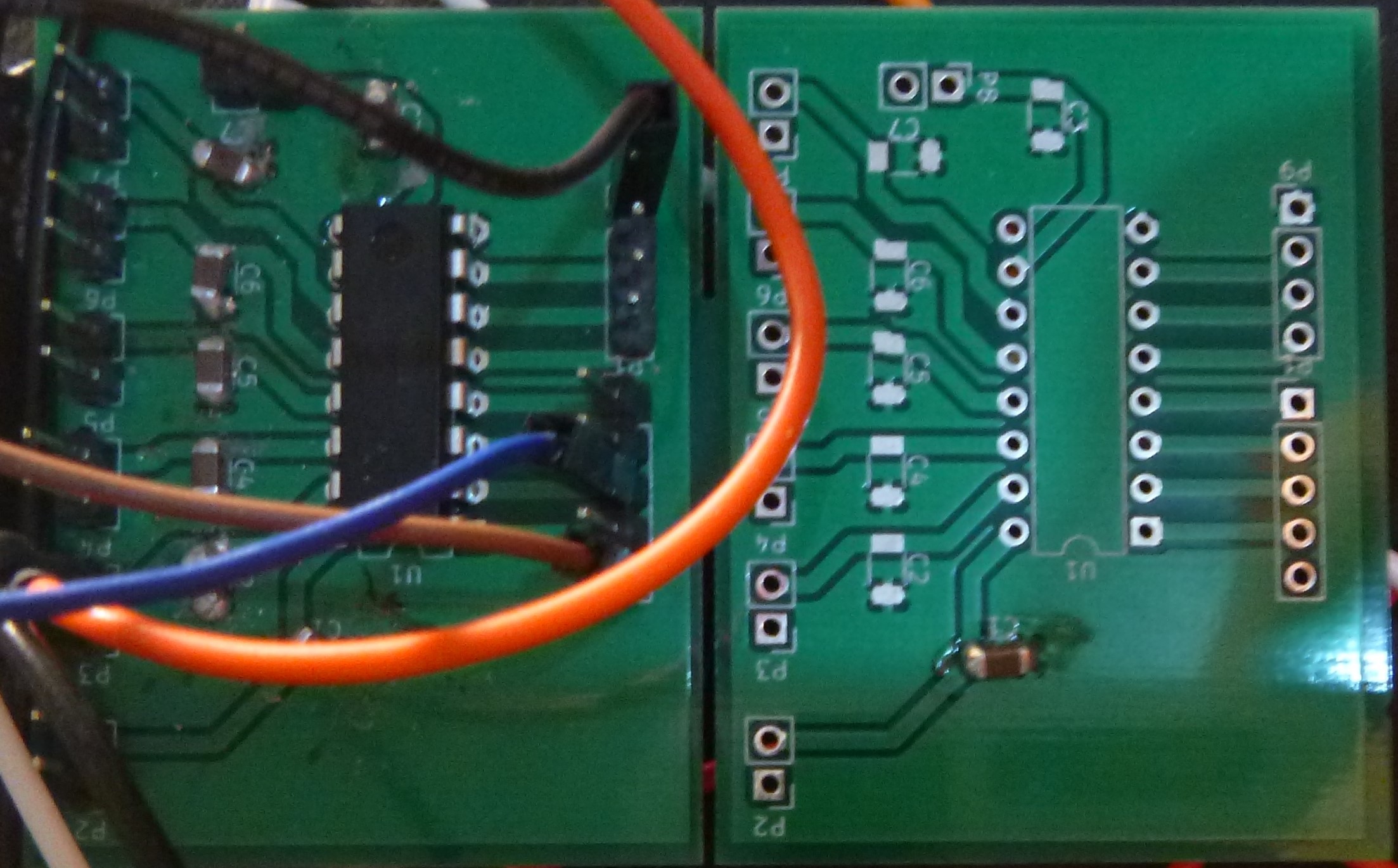
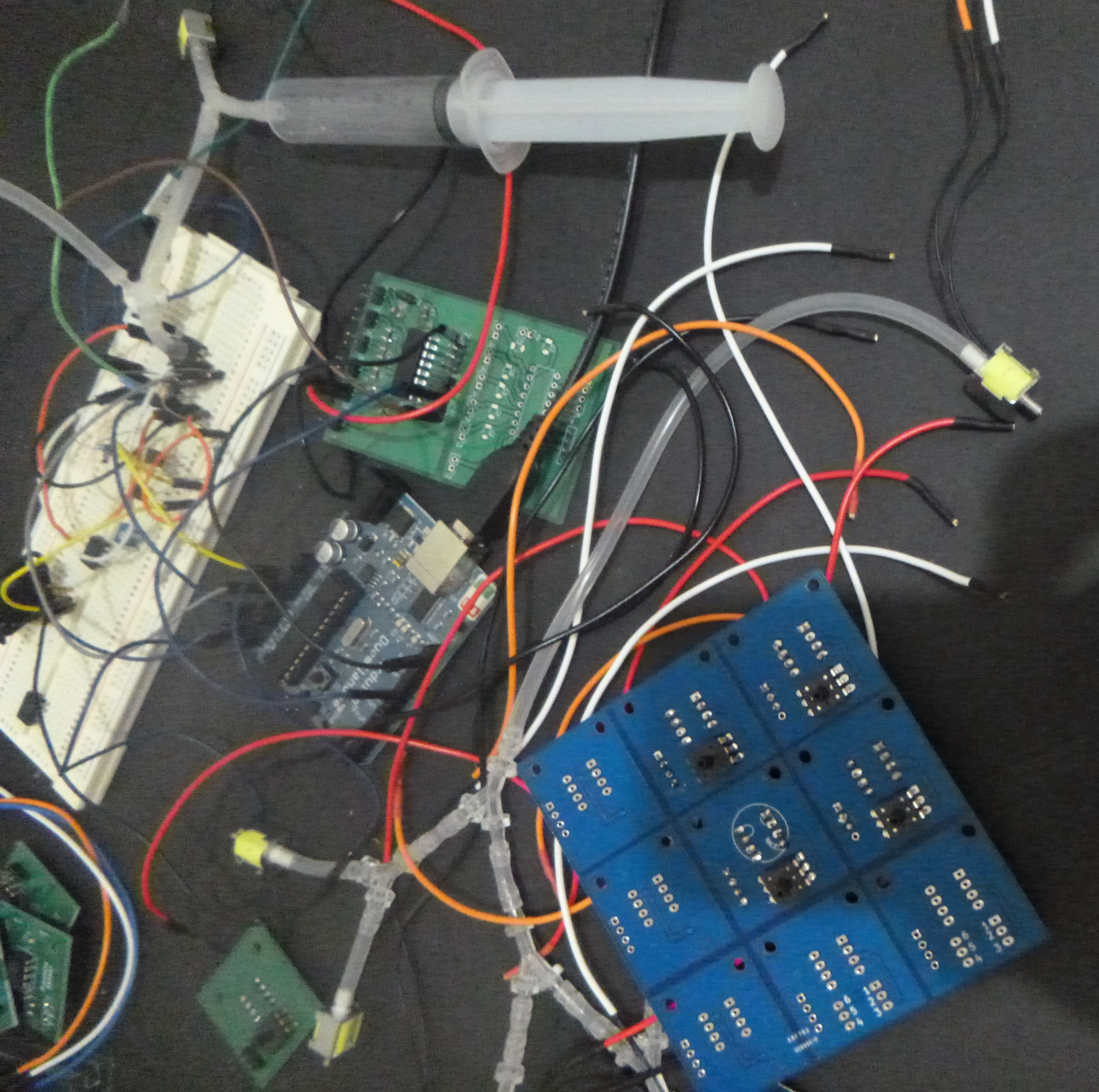
The control circuit for the pneumatic actuation requires a air pressure sensor and a valve driver. Both the pressure sensor and valve driver was designed as separate pcb.
The outline of the pneumatic circuit uses the following outline. A solenoid valve releases the pressure into the pneumatic circuit with the actuation of individual fingers via another solenoid valve in series. In this way any actuation powers the inlet valve and fingers valve. The intention is to enable the pressure to controlled either by a variable valve or second pressure vessel.
Valve driver.
Pressure sensor uses a Wheatstone bridge sensor, instrumentation amplifier and gain resistor.
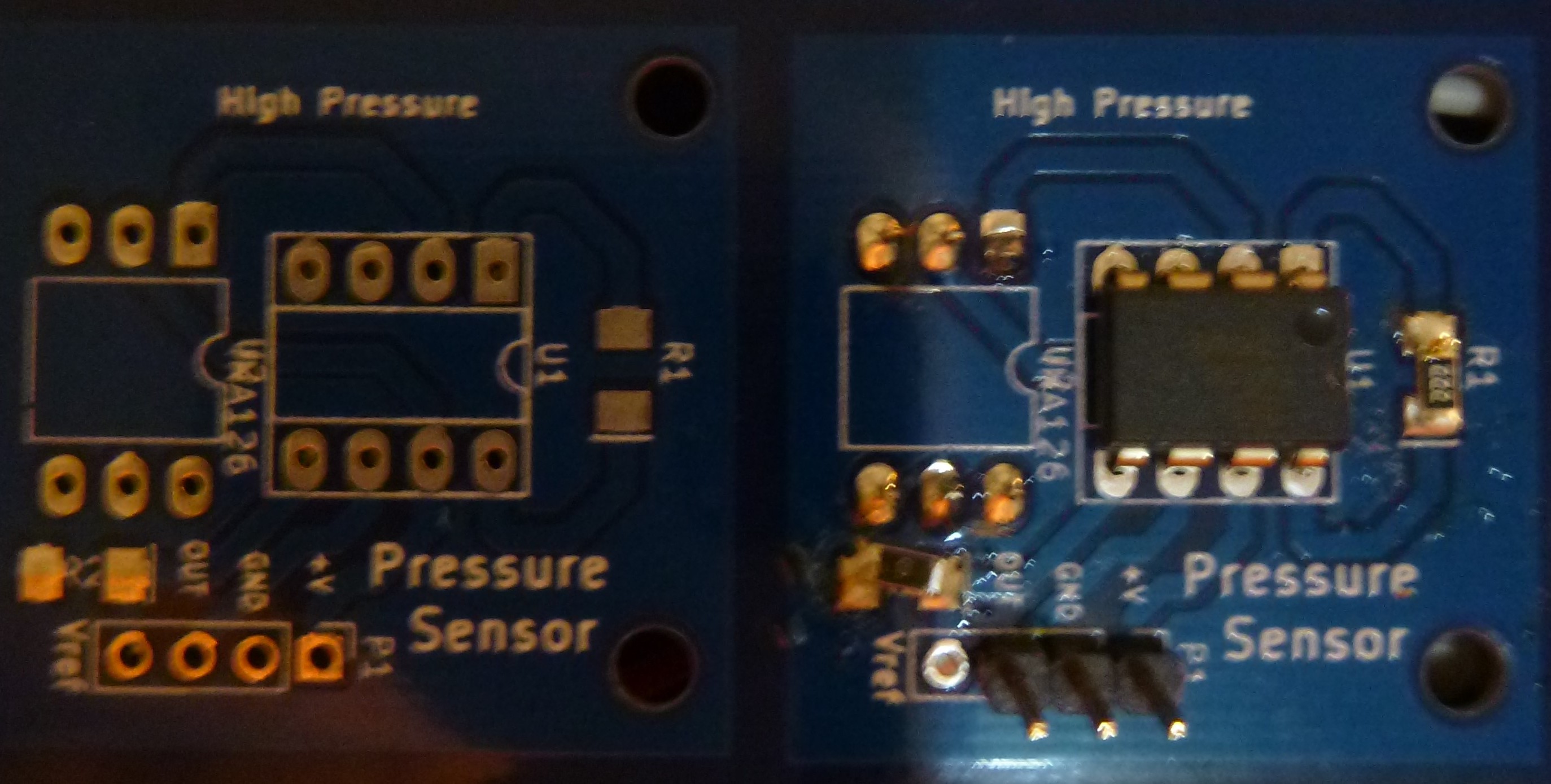
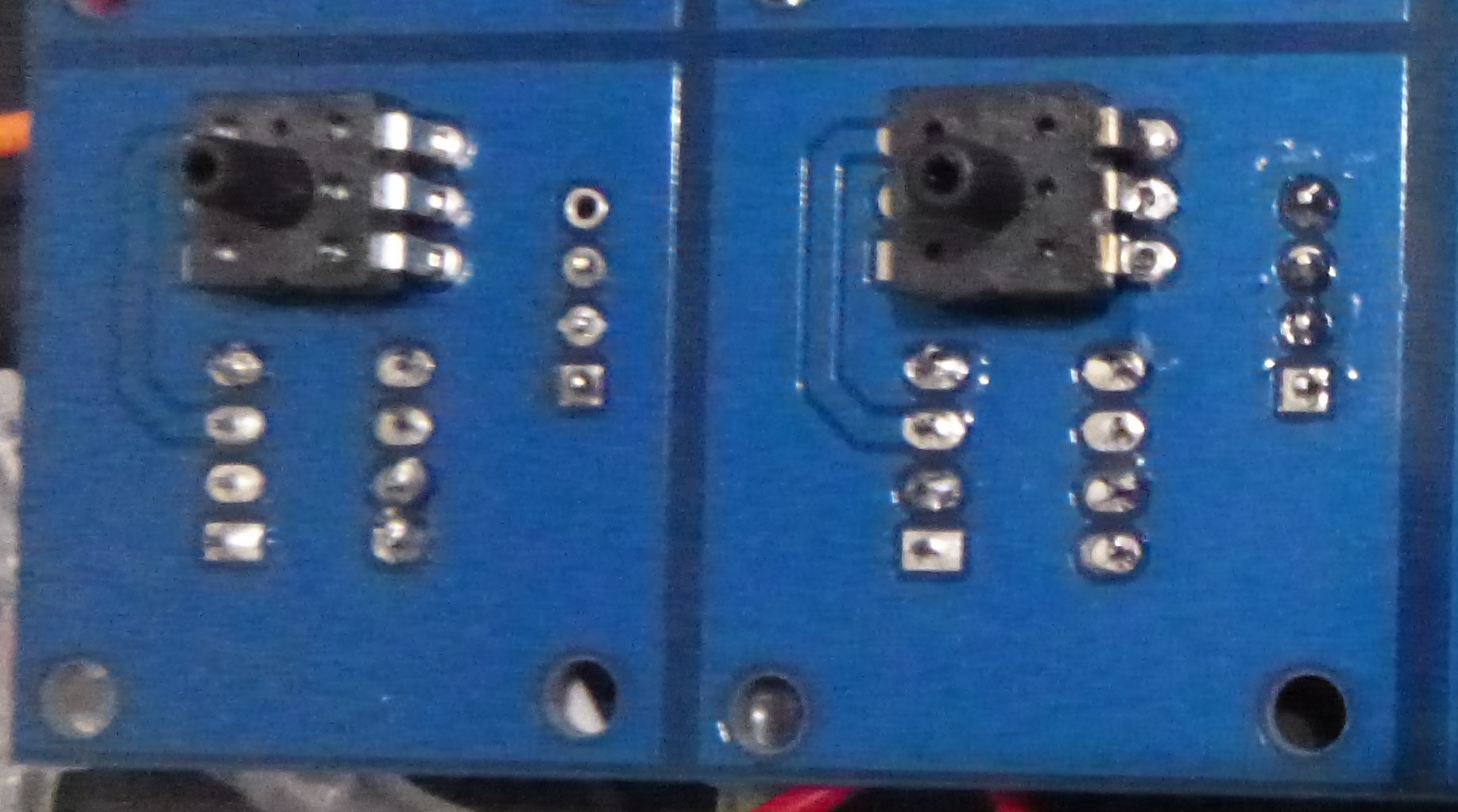
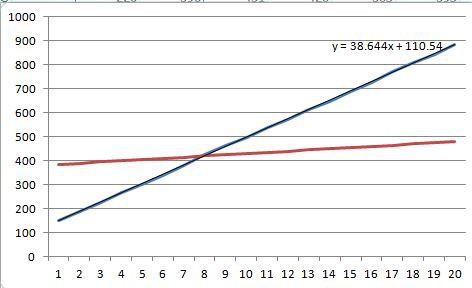
Coordinating the control of the pneumatic circuit used a MPX4250 to calibrate and select the gain resistor. The method used was to link the sensors and write the analogue values through 20 increment by 5 relative to the MPX4250. This also gives a linear equation for future reference.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.