 nerd.king
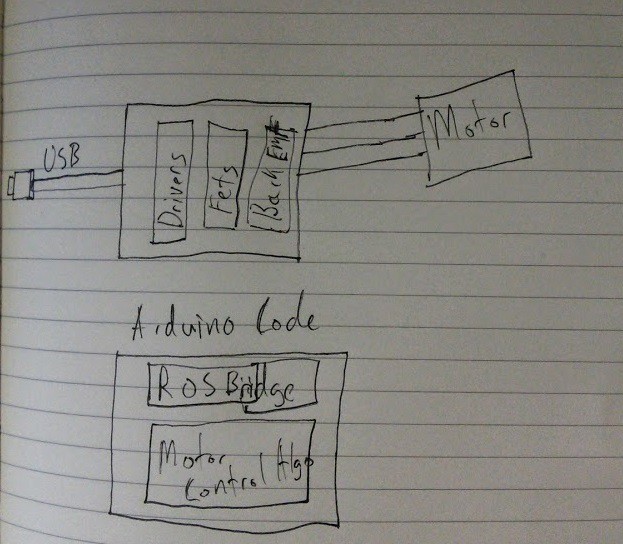
nerd.kingAfter failing to fund the OpenRover prototype a couple of years ago, I decided to take a more incremental approach. OpenBLDC is a shield and eventually an integrated arduino with a ros interface.
0%
0%
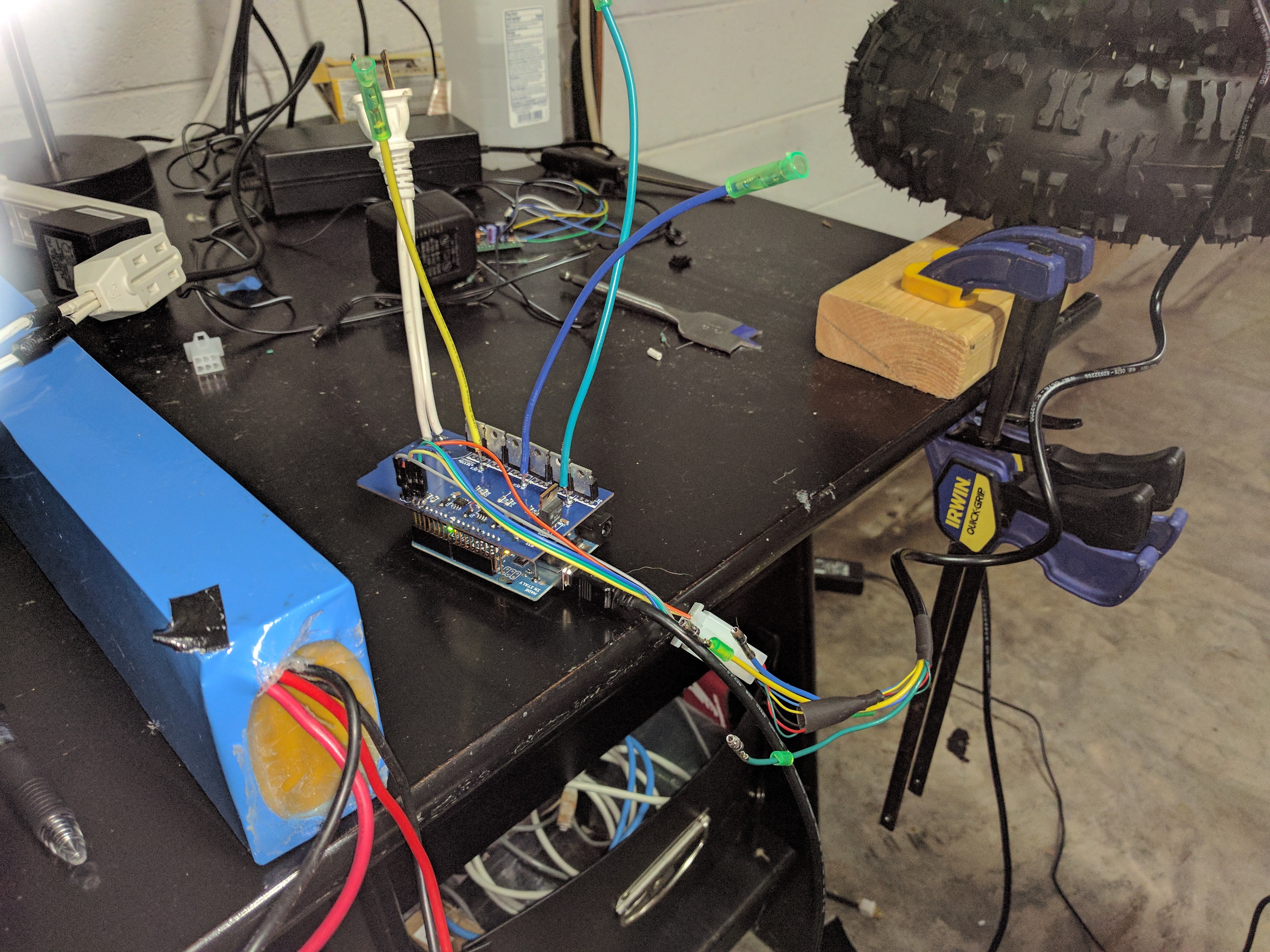
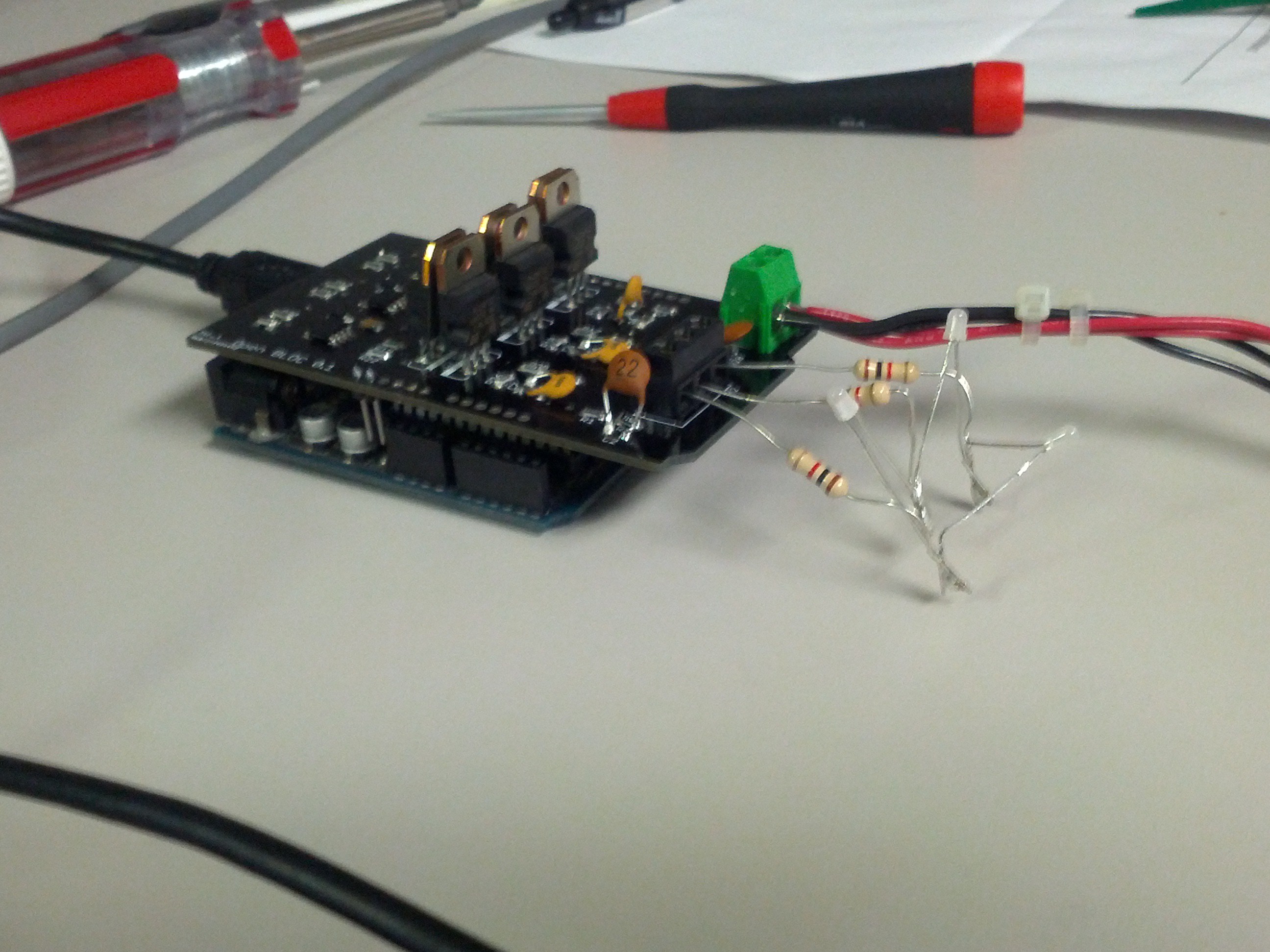
OpenBLDC
BLDC shield for arduino and stand alone controller
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests











 Matthew Potter
Matthew Potter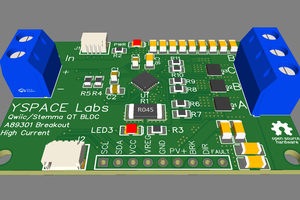
 YSPACE Labs
YSPACE Labs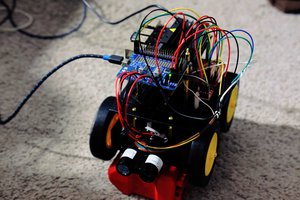
 Kyle Isom
Kyle Isom
 Jarrod
Jarrod
hi can you help me please?
I need to replace ir2101 with ir2113 for prototyping... but I need help...