 Lee Cook
Lee CookIt’s been a long while since I worked on this project, life got in the way and, to be frank I think I burnt myself out of enthusiasm trying to get the circle:ellipse approach I outlined in my last post to work. The actual ellipse fitting algorithm worked like a charm, however, the type and amount of distortion perspective would put in to the “ellipse” ended up being way more than I was able to efficiently to compensate for. Essentially, the circle is transformed by a parallelogram which, unfortunately, moves the original centre line to above/below the point of maximum width:
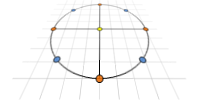
Trying to understand this effect lead me to a paper by Randall Bartlett a professor at Auburn University. In the paper (The Bad Ellipse: Circles in Perspective), he confirmed that the minor axis does align with tilt direction of the plane the circle is on vs the viewing point, however he explained it in terms of vanishing points (giving rise to the parallelogram). It was at this point I ran out of steam and let home and work life take over for a long while.
Over the past few months there has been a renewed vigour on the @CNLohr LibSurvive project with the Discord chat becoming very active and, while I’m not contributing to Libsurvive, it did actually give me the impetus to try another time to get a working poser for my system. So, after quite a bit of reading on ellipses, vanishing points and other related topics, it finally dawned on me that I should be able to use the vanishing point principle to make a poser.
The approach is fairly simple, if the base station is moved from its current position in a direct line toward the centre of the sensor cluster then the sensors would appear to move in a straight line toward/away from the centre point of the object. I.e. they would move toward/away from the vanishing point (think of the stars in a Star Trek warp journey):
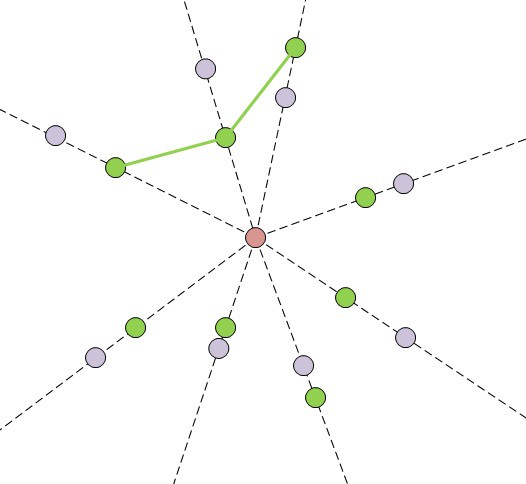
So, if you take an estimate of the bearing with an arbitrary range (red point) giving theoretical points for the sensors (purple), you can then work out what the estimated angles between the sensors are. These angles would remain constant regardless of the distance the base was from the cluster. There is then an iterative process where you take groups of three sensors and, using actual sensor position data along with the angles from the bearing estimate, you find the point which would gives that pair of angles.
Doing this for all the visible sensors will give a number of positions, you then iterate and refine the estimated bearing until the positions converge and the angles match the estimate at the convergence point. So, once you have the bearing, you then alter the range until the angular distances between the points and the bearing point are the same. You can also look at the rotational aspect by looking at the measured angles vs the cluster relative axis.
After all this, you should have a range, bearing and base rotation wrt to the cluster on that bearing.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.