 Mike Rigsby
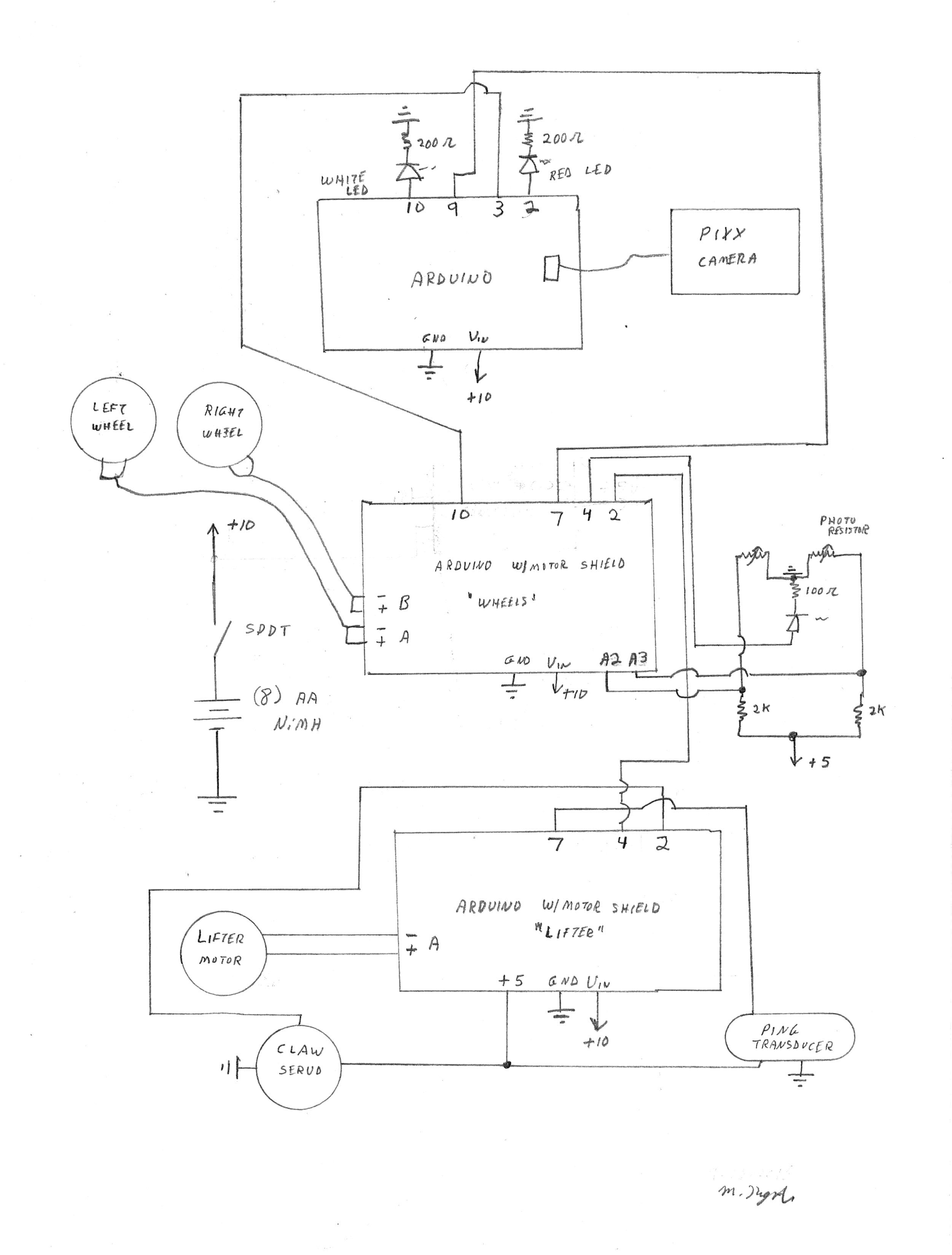
Mike RigsbyI've started to add line following capabilities to the robot. This log will detail the hardware side. First, there's the schematic which includes the two photocells and an led light source.
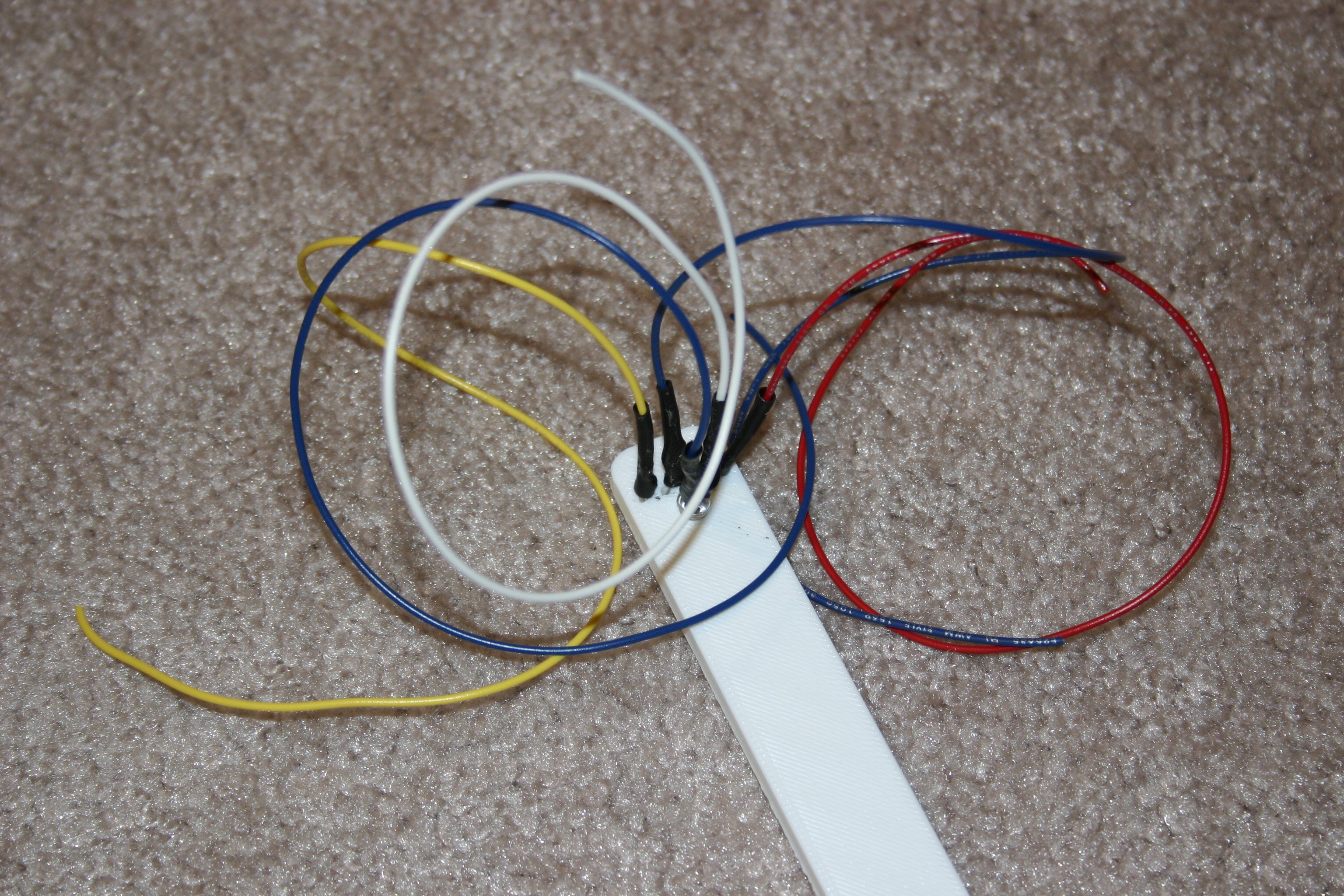
I designed a bracket to hold the line following electronics and that is called the "line follow bracket" (files included on this site). I inserted the parts and soldered wires (with heat shrink insulation) to the components.
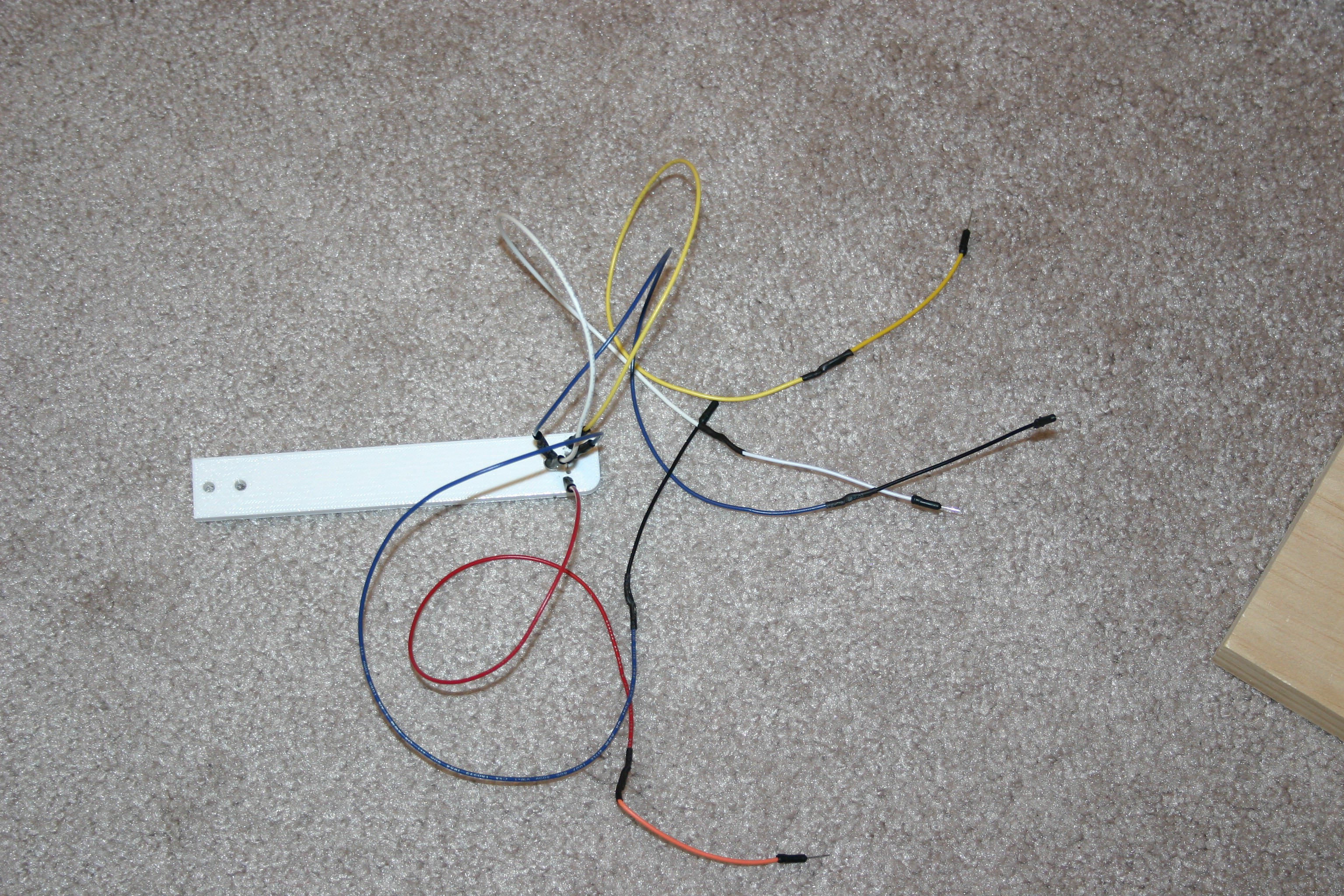
I soldered breadboard pins to the other end of the wires.
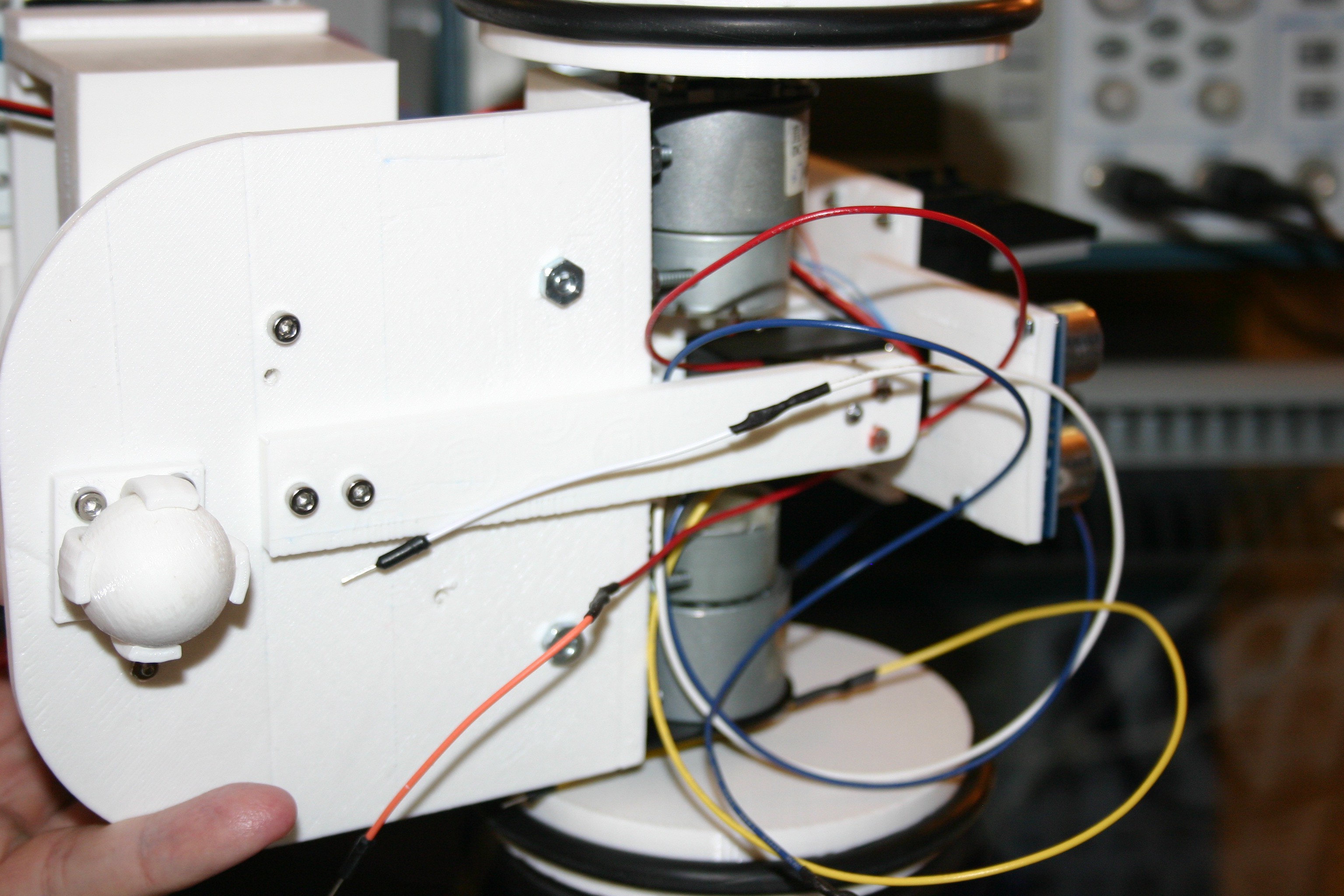
I drilled holes and mounted the arrangement on the bottom of the robot.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.