 ottoragam
ottoragamI borrowed a Prusa i3 from a friend. I wanted to show the performance of the 30W motors I got, so I made a NEMA17 adapter from a piece of acrilyc and replaced the X axis stepper with my servomotor.
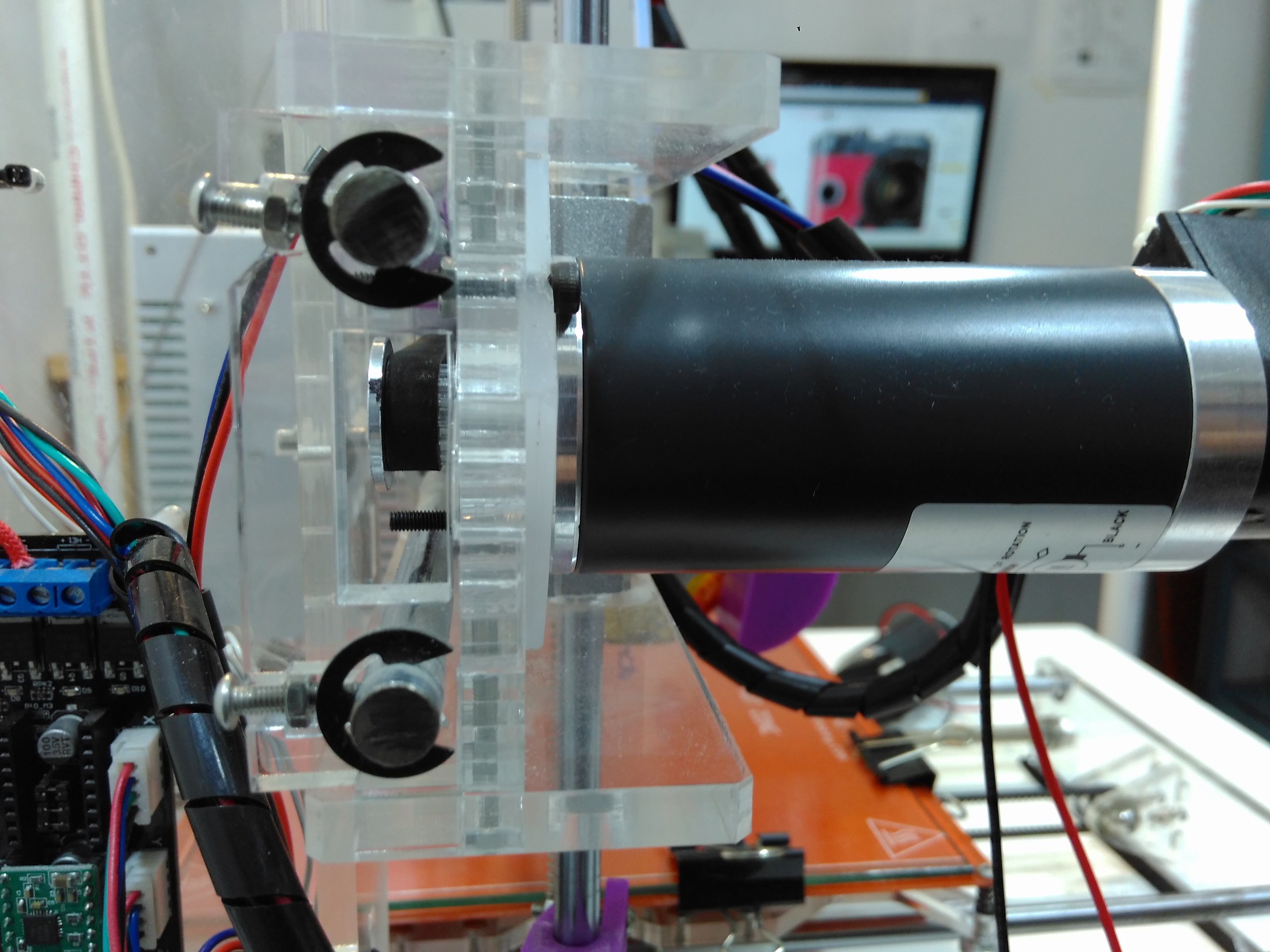
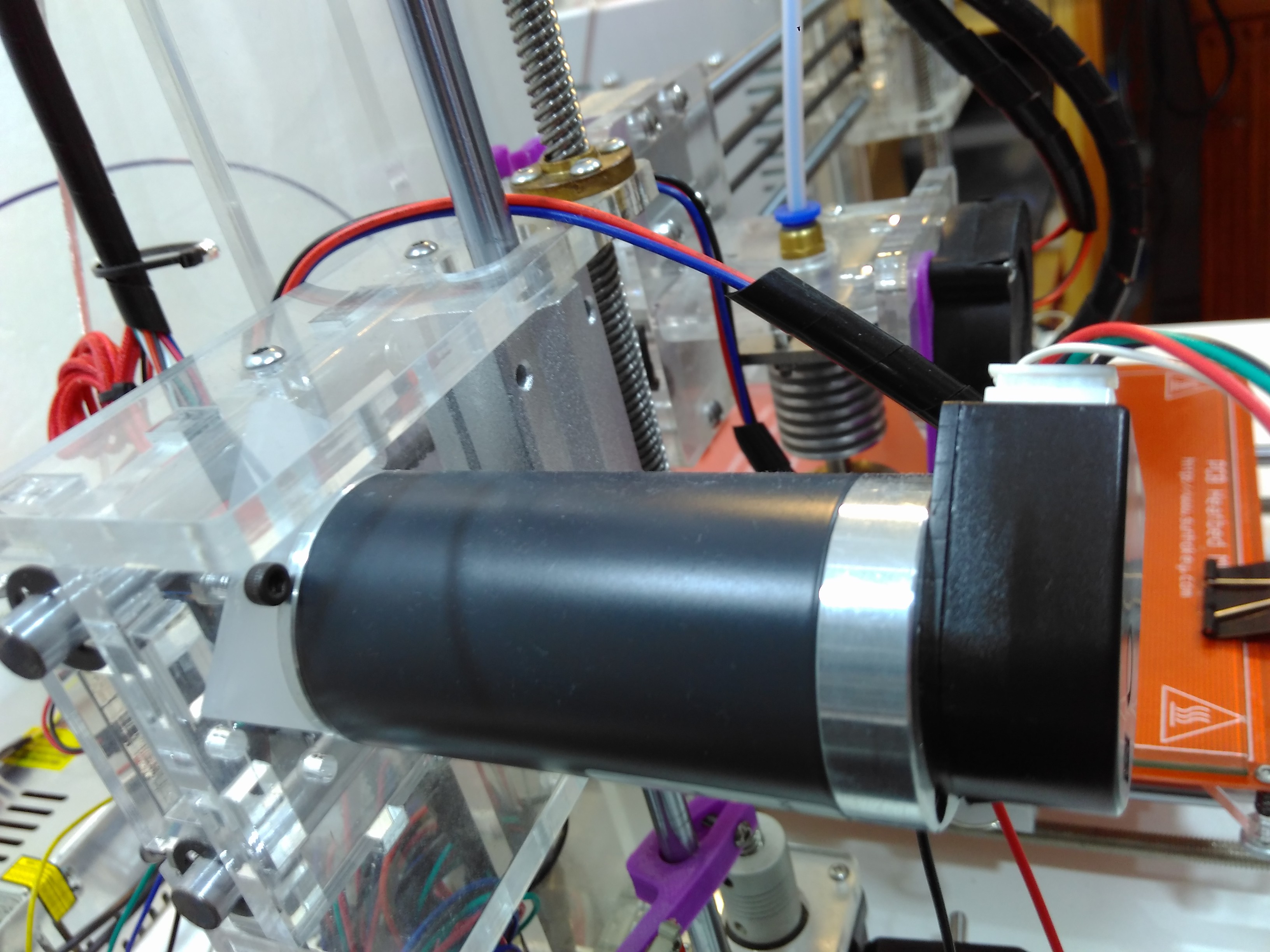

But it has 3 times the mechanical output power!
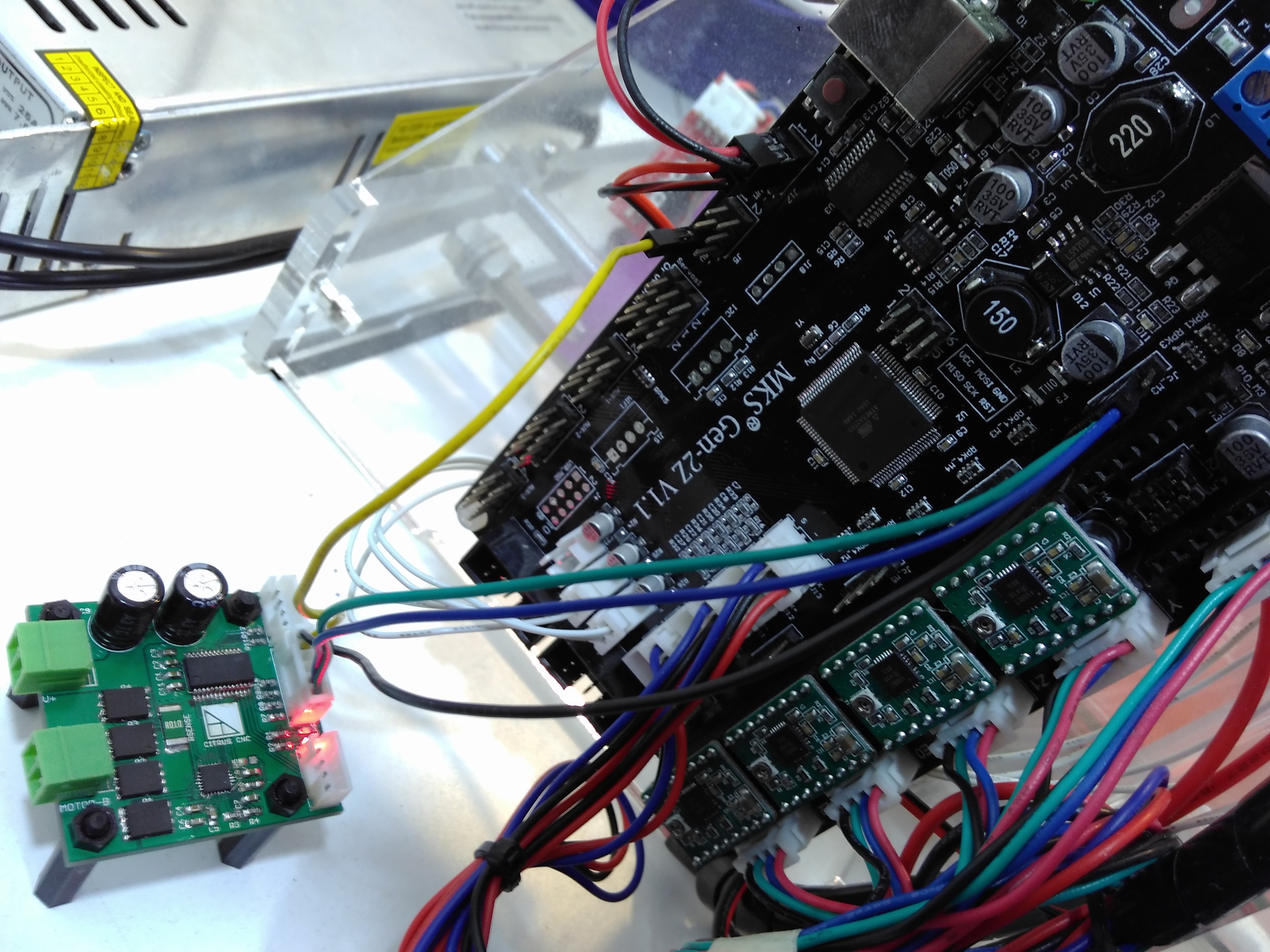
I used one of the available headers on the MKS board to supply the signals to my controller, and removed the stepper driver from its socket.
After getting familiar with the 3D printing software (I used Repetier), I was able to print the classic ship thingy.
Unfortunately the printer only had space for my servomotor on the X axis, and I didn't wanted to modify it as it was not mine. The good thing is that I have an old router available for more testing. I just need to replace the steppers with the servomotors and do some testing!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.