So we start with the calculus of the motors we need to move our beautiful bodies when we stand on one foot, mine is like 85kgs, so we will work with 90kg. An average max step distance is of 80cm, and then again we will work woth something greater, in this case 90cm.
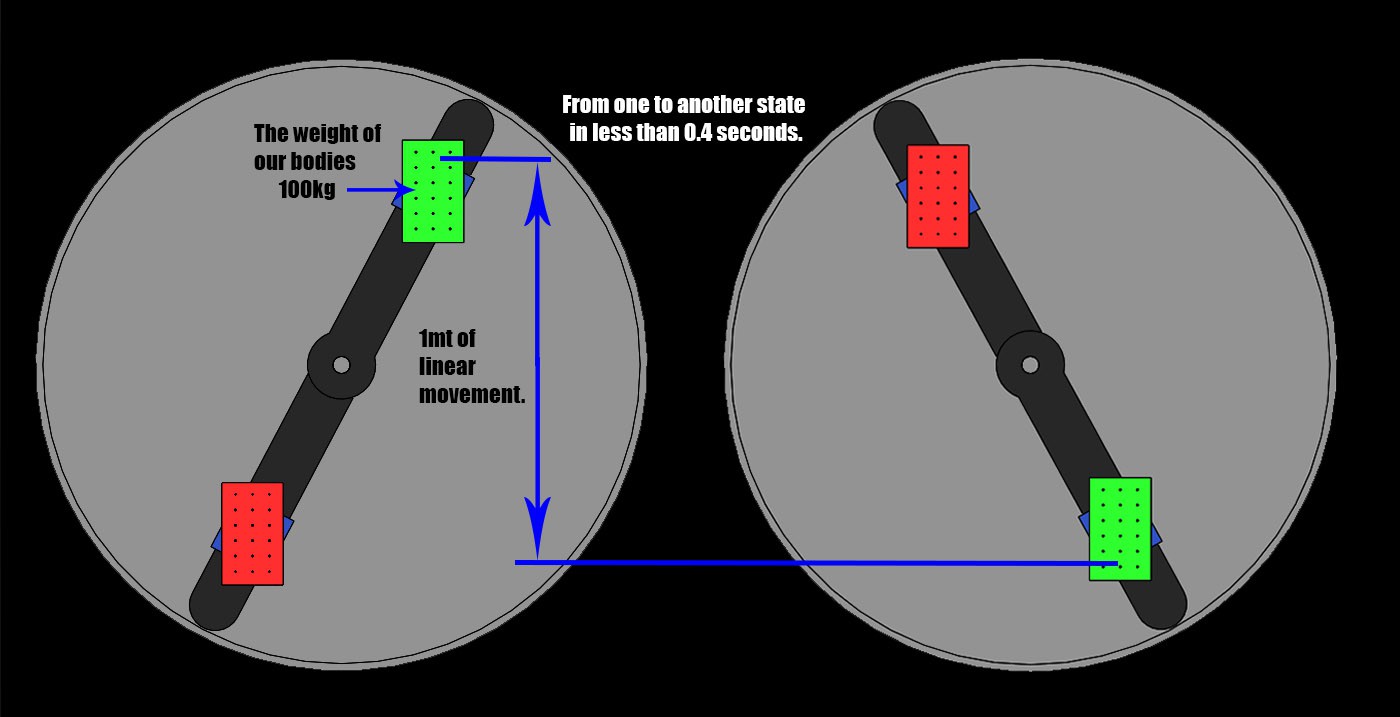
Wikipedia says: Many people tend to walk at about 1.4 m/s (5.0 km/h; 3.1 mph; 4.6 ft/s). Although many people are capable of walking at speeds upwards of 2.5 m/s (9.0 km/h; 5.6 mph; 8.2 ft/s). 0.4secs (1mt/2.5*1sec) in 1mt. For prototype purposes we will just walk at 0.55, run will be for version 2 or 3.
The fastest acceleration for our walk will be 2.5m/s^2.
So taking the maximums, we need a system that can move 90kgs a distance of 0.9mt in less that 0.55secs.
We need the hands to rotate at a speed of 0.8 revs per second at a max of 0.45mts from the center axe, enough to move a body.
In rotational proportions, the hands wil just make half a revolution for each step. We will not take the torque we need from the center, instead i'll build a rack in the inner circunference and put a gear in the end of each hand.
If we multiply the diamater of the system circunference per Pi (3.1416) we will get the circunference itself, and split in half the max distance that each hand will move is 1.42 mts.
Now we need to move 90kgs a distance of 1.42mts in les than 0.55secs. The power in watts we will need is (90kgs)(2.4m/s^2)(1.42mts)=306.72/0.55=557.68 watts, for expected friction we will round it to 600 watts. Now we now how much power we need from the first set of servos.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.