 Simone Tolomei
Simone Tolomei
0%
0%
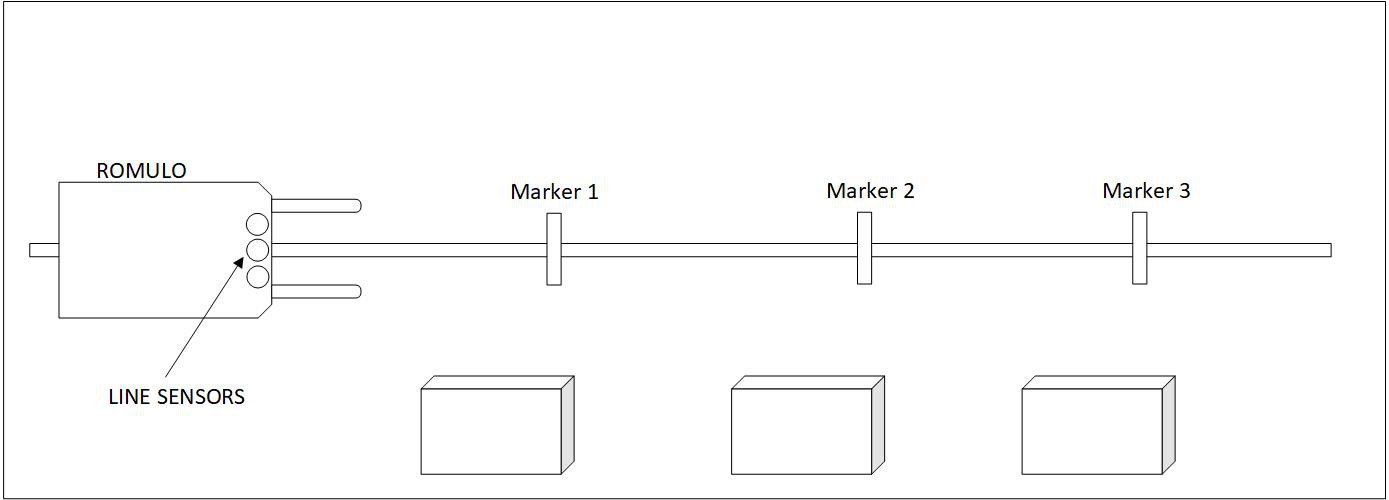
Romulo - the robotic forklift
Small full-autonomous robotic forklift, based on PIC18F
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests


































 NotBlackMagic
NotBlackMagic

 Roald Lemmens
Roald Lemmens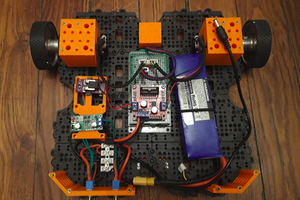
 matop
matop
Truly, a most amazing piece of machinery constructed here. Perhaps one of the best engineering builds that I have seen in a while. Very nicely done!