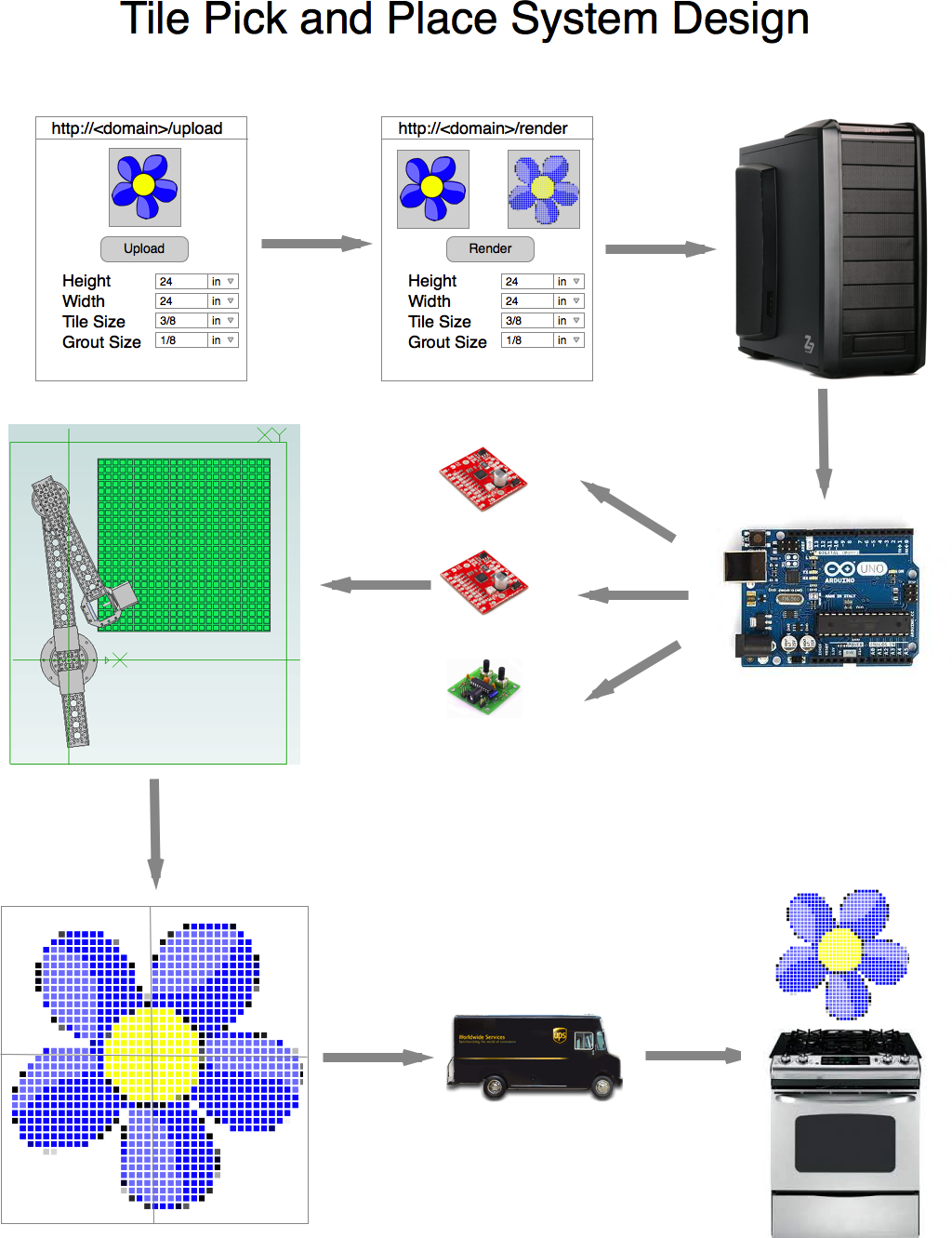
System Design -
- A user uploads an image to a server
- The user specifies the height, width, tile size, and grout line size and manipulates as necessary to get the image to look good tiled
- An order is placed and the design is downloaded to a local server
- The local server divides the image into 12" x 12"
- The local server uses a camera mounted on a scara style arm and open cv to select a tile and place it in order to build up the image
- An arduino with big easy stepper drivers and servo drivers moves the arm
- A preview of the sheets is emailed to the customer
- Accepted sheets are shipped out to the happy customer!

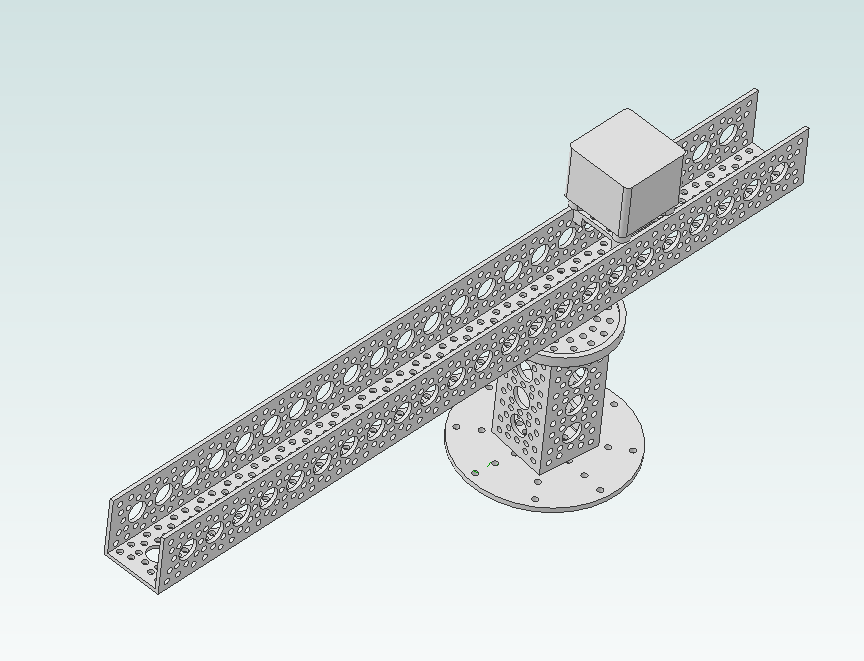
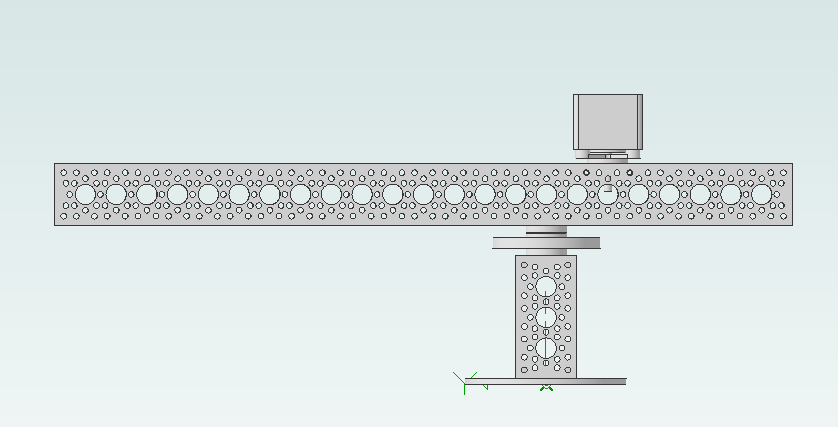
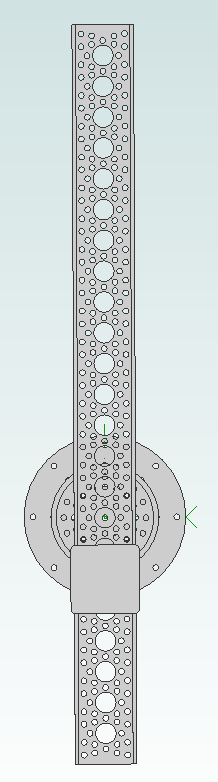
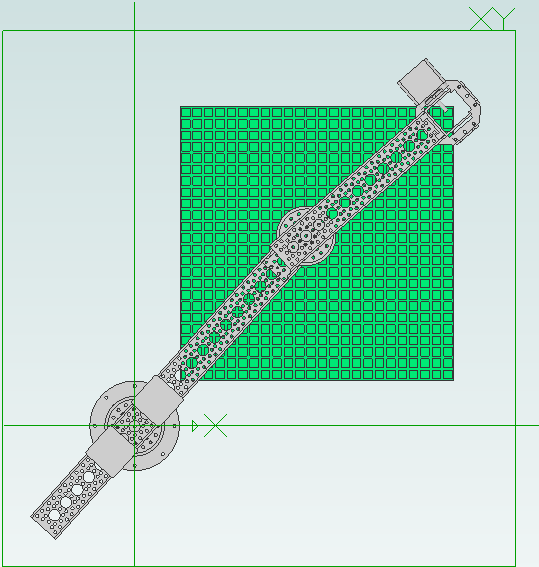 SCARA Arm Minimum Reach
SCARA Arm Minimum Reach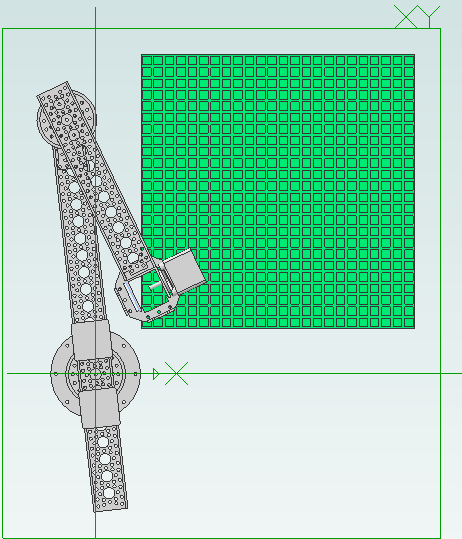 As you can see in the minimum reach image I need to make the second arm longer in order to get the last few tiles into place. One of the really nice things about using a SCARA robot is that I would essentially have 4 quadrants to work in. This means that I could either do a few fields of source tiles and a few sheets at once or any combination thereof. I'm concerned that the arms may not be stiff enough, especially since I haven't defined the end connector yet.
As you can see in the minimum reach image I need to make the second arm longer in order to get the last few tiles into place. One of the really nice things about using a SCARA robot is that I would essentially have 4 quadrants to work in. This means that I could either do a few fields of source tiles and a few sheets at once or any combination thereof. I'm concerned that the arms may not be stiff enough, especially since I haven't defined the end connector yet.


 Kenny.Industries
Kenny.Industries
 ThunderSqueak
ThunderSqueak
 BDM
BDM
 Andrew Schreiber
Andrew Schreiber
Don't forget to keep updating as you move along with your project - the more information the better!