For the first iteration of this project I've got a fundamental decision regarding the frame of the machine. I've gone through a few designs and looked at some material choices. The working envelope of the robot needs to be a few inches larger than 12"x12" since that's the size tile sheet I want to make. I'll need an area for the robot to pick up the tiles as well. I haven't decided yet whether I want to just have a field of tiles to pick from or preload tubes of tiles. Presorted tiles would allow for the fastest system but I'd either have to build another system for doing the sorting or do it by hand. Personally I think I'd like the robot to do the sorting for mark 1.
The first thing that came to mind is a SCARA robot for a couple of reasons, they're generally fast, accurate, and there aren't a lot of DIY versions out there. The software for a SCARA robot is generally more complicated, but there are open source packages out there that can handle it. I definitely feel an attraction to the idea of doing something that not a lot of makers have done, but the practical reality is that I also have a limited amount of time and I really want to see this project completed. From a back of the envelope perspective the cost of materials for a SCARA arm should be less than a gantry style robot, but that's really back of the envelope and I'm sure that there are a lot of unknowns.
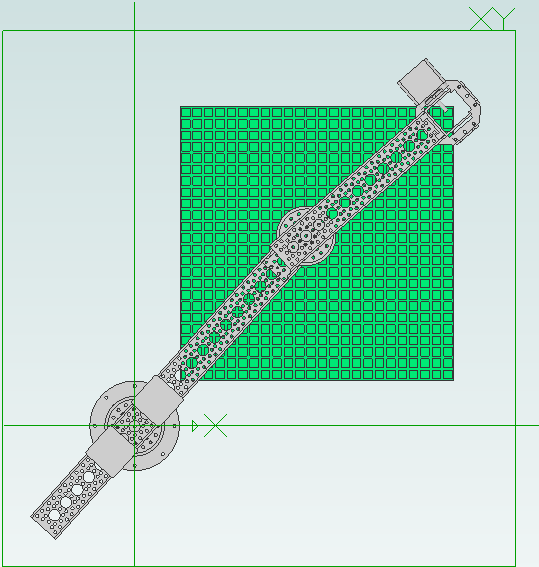
SCARA Arm Maximum Reach
 SCARA Arm Minimum Reach
SCARA Arm Minimum Reach
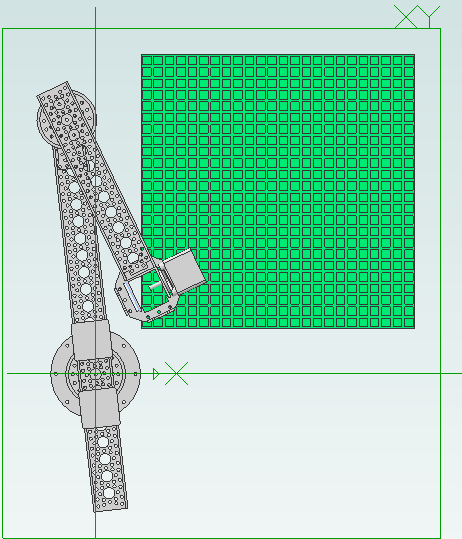 As you can see in the minimum reach image I need to make the second arm longer in order to get the last few tiles into place. One of the really nice things about using a SCARA robot is that I would essentially have 4 quadrants to work in. This means that I could either do a few fields of source tiles and a few sheets at once or any combination thereof. I'm concerned that the arms may not be stiff enough, especially since I haven't defined the end connector yet.
As you can see in the minimum reach image I need to make the second arm longer in order to get the last few tiles into place. One of the really nice things about using a SCARA robot is that I would essentially have 4 quadrants to work in. This means that I could either do a few fields of source tiles and a few sheets at once or any combination thereof. I'm concerned that the arms may not be stiff enough, especially since I haven't defined the end connector yet.
You'll notice that this arm is using some off the shelf parts from Actobotics (Servocity and Sparkfun) for this design.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.