Motivation:
The majority of America's firefighters are volunteers. And volunteers are becoming increasingly difficult to find and keep. Many departments are understaffed so larger scenes are difficult to manage with the few resources available. This isn't only true for fire scenes, but search and rescue and incidents where there is more area to cover than personnel to assign to the task. Robots are a great tool to help offload some tasks onto but they just aren't seen a lot in emergency situations. If a robot could quench a fire while firefighters do the more important search and rescue, or if a robot could assist in search and rescue in situations where firefighters cannot enter (unstable floor, etc.) or when more eyes are simply needed, it would help tremendously. The same is true with finding a lost person in the wilderness or if officers are entering a volatile and dangerous environment.
Unfortunately the few robots that are being used need a person to control them - not really freeing up resources. Part of this is due to the lack of appropriate sensor packages. A robot could help extinguish a fire if it could see where to put the water. It could also find a person in any environment by recognizing the respective heat signature.
Enter the H.E.R.O. sensor.
Background:
As a 15-year volunteer firefighter and 22-year volunteer EMT (and 25-years in various industries as an Electrical Engineer doing everything from Research and Development through production support) I am always on the search for cool things to help protect emergency responders. I've always had a thing for robotics (with my first being a Heathkit Hero 2000 - which I still have - before graduating from high school) so I thought why not bring a taste of the future to firefighting and other emergency-response situations?
The Product:
With 'any' scenario in mind, I wanted to create a sensor array that could be mounted on a variety of platforms (rovers to drones) but function independently from that platform. Of course power and locomotion would come from the platform, but everything else would be packaged in the sensor array, including the ability to "scan" via a pan/tilt mechanism.
The sensor array would need to identify programmed heat signatures (fires, people, pets, etc.) but also pinpoint that heat signature in 3D space so it could direct the platform and communicate back to command.
Finally, the sensor array should monitor the environment for dangerous conditions.
I settled on the following:
- FLIR Camera - the work-horse for heat signature recognition.
- IR Temperature - determine a temperature from a distance.
- Air Quality Sensor - TVOCs, CO2, temperature, humidity and pressure.
- VL53L1X Distance Sensor - measure distance from an object.
- Servos for a Pan/Tilt mechanism for scanning without requiring platform motion.
I considered more, such as CO and O2 levels, but I though this was a great start knowing the array could expand once the concept was proven.
The processor to drive all this is an CORTEX-M7 to provide the I/O and power needed to do all this.
The Test Platform:
A Lynxmotion A4WD2 Rover base will serve as the test platform. For simplicity (and to save expense) I'm using an Atmel SAMV71 Xplained Ultra kit (which I had lying around - yay!) as both the sensor array brains and Rover controller.
The Original Plan:
So, at the start I had visions of creating custom hardware and getting it all in and assembled before the contest ended. These are pretty tiny components so prototyping would have been a challenge, as well as expensive, not to mention probably not within the time allotted for this contest.
The Modified Plan:
SparkFun (can I say that here?) had all the sensors I wanted in tiny module forms so I could solder them onto a breadboard, mount the breadboard to a pan/tilt module and route wires to the sensor array...
Read more »
 Minimum Effective Dose
Minimum Effective Dose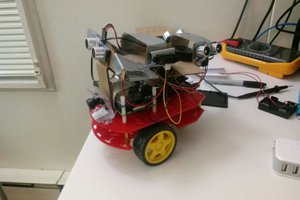
 Sinclair Gurny
Sinclair Gurny
 hIOTron
hIOTron
 Kenny.Industries
Kenny.Industries
I have fielded some comments concerning "real-world" practicality relative to the extreme temperatures found in fires. Of course this is just a proof-of-concept at the moment. It will be tested within the temperature range of the components first. Then, if the product survives scrutiny, attention will be turned to environmental protection so it remains useful in near any condition.
Additionally, HERO isn't only for fires, but for other search and rescue and even SWAT assistance.