 TTN
TTNThe target printable area will be at least the standard 200mm cube. The Delta Robot Forward/Inverse Kinematics Calculator has been very helpful. with the configuration as below, we'd will theoretically have a working cylinder of at least 200mm in diameter and 200mm high. That's the theory anyhow, and theory and practice, are too often not the same ;)
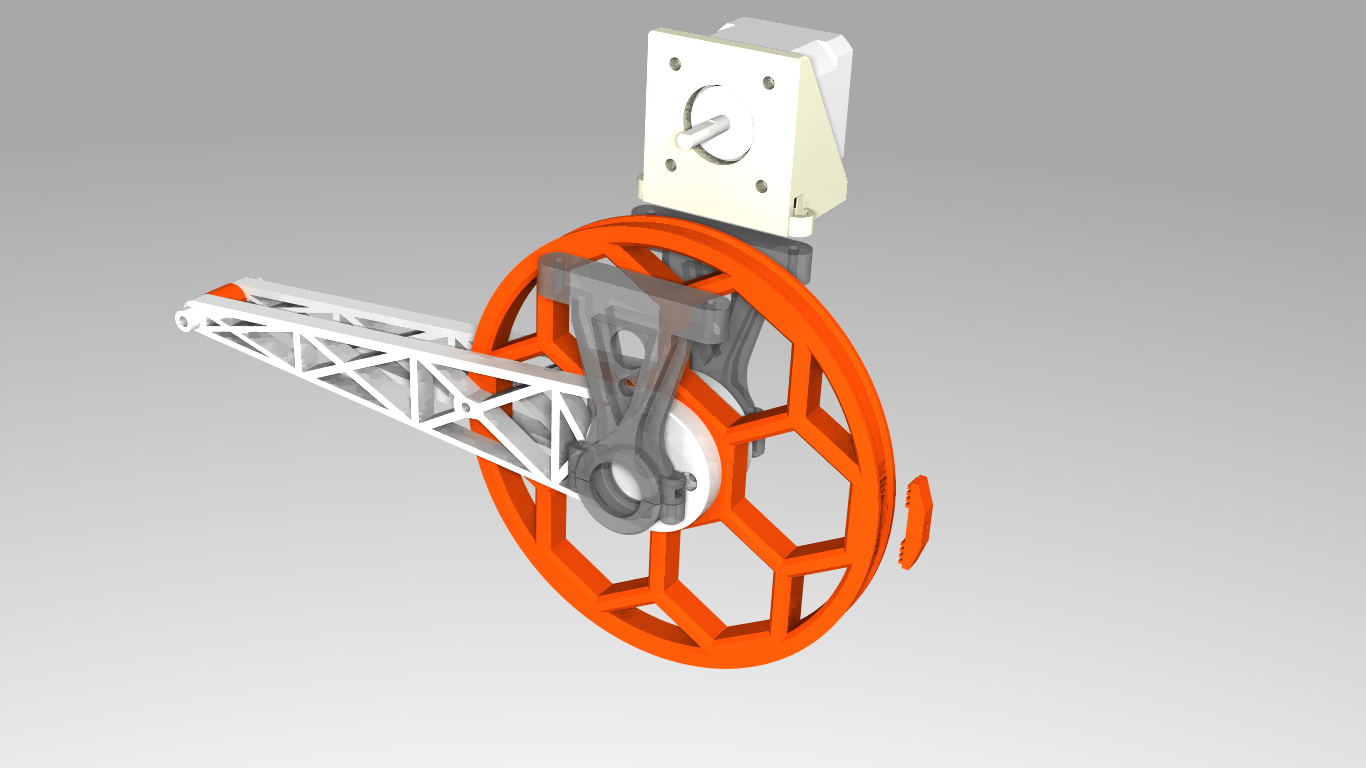
We got most of the cad drawings done. What we have so far is on the Github repository. I'll start printing parts when replacements for my printer arrive in the next few days.
One thing that we would like to do is replace the standard traxxas rod ends with printable universal joints. I have a few ideas which I will be testing.
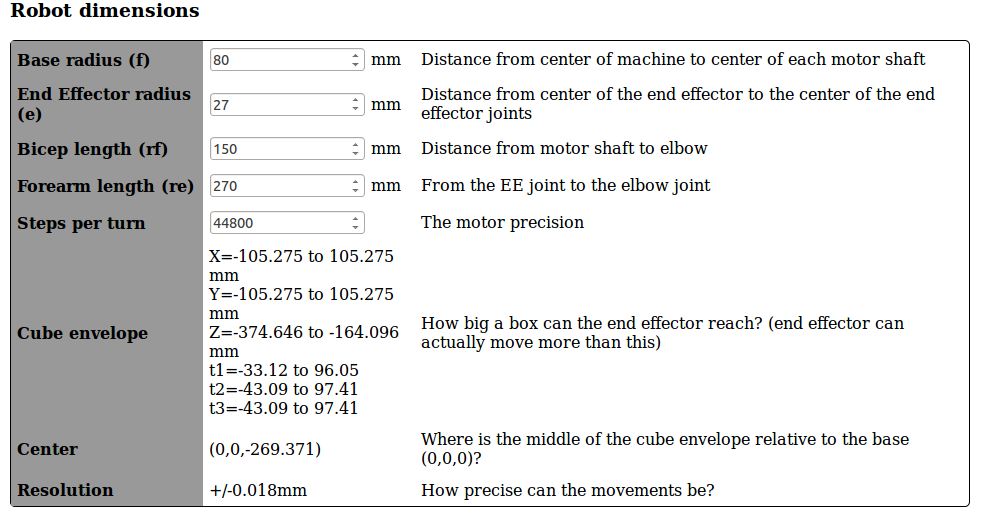
The firepick project calculations came out at a resolution of 0.0201mm when using a 10:1 ratio on the stepper motor to the upper arm which was 100mm long. To get the desired build volume, I had to make the upperarms longer. To maintain accuracy I settled on a ratio of 14:1. Using the accuracy information as above from the firepick project and pulley ratios, the accuracy should be 0.0215mm. When I did the calculations by hand I came out with an accuracy of +/-0.04mm, which should be ok. If my accuracy calculation result of +/- 0.04 mm, which has a generous amount of tolerance, is wrong, and the calculations based on the firepick of +/- 0.0215mm are correct, that would be even better. The catch here is that I am assuming x16 microstepping (on 1.8 degree steppers), which may not actually perform as well as I'd like.
Special thanks goes to Matt Kimbal for teaching me how to use FreeCad and all his wonderfull input who without this project would not have been.
I got some of the frame put together over the weekend. The semester has started now, so I expect not to have much time to work on the project. I ordered parts which have an expected arrival time of 20 to 45 days which should be in time for the mid semester break :P
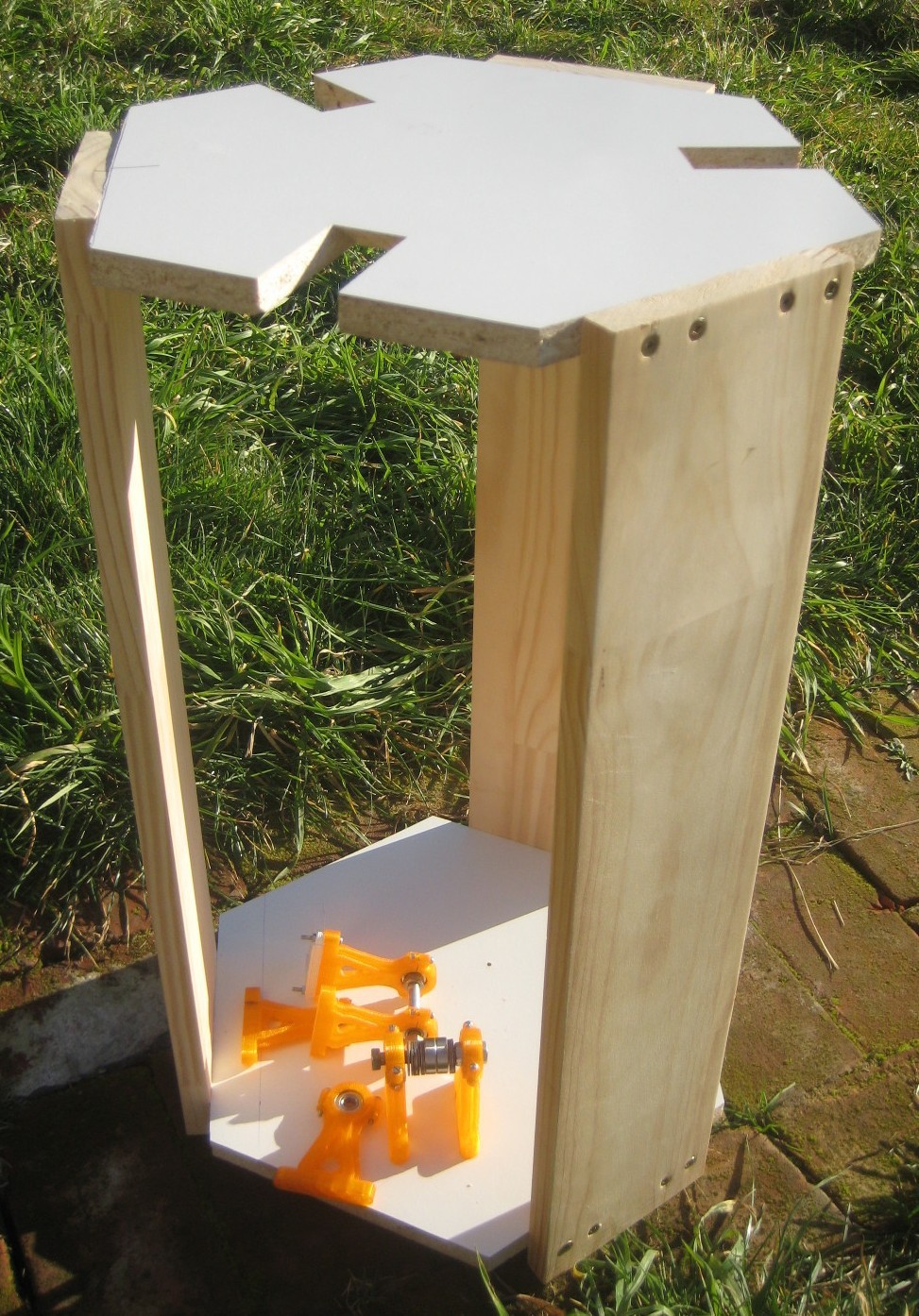
The frame does have a little flex when force is applied. I might add some reinforcing pieces later.
Repstrapping with this design shouldn't be too hard, given you have access to a lathe like me. It's an attractive option, as creating round parts on a lathe is not difficult ;) Some bits of custom wood for the upper arm, a printed part for the end effector and motor mounts and I should be all good to go!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.