 Giovanni Leal
Giovanni LealFirst of all, we are going to visit the WMF at NYC. Hackaday has a slot to speak about the Prize and they asked us if we would like to speak a little bit about the experience and we said yes! If you are going to be around the area come by and say hi.
So about the current actuator.... we had an idea.
We always tought that the design was pretty clunky, big, lots of mechanical components... and it comes for the thing that makes it "great", the potenciometer.
That thing its so hard to calibrate.
So the current desing we take the H bridge and the "position sensor"from the servo. So if we are going to replace the potenciometer.... no more H bridge. So thats an easy fix: https://www.adafruit.com/product/1438
We have use this board before in the OWI arms project and it works great, also the code its much much cleaner than having to simulate you have a servo attach.(also availabel for feathers)
So the potenciometer? we need something thats not mechanical so, hall sensor.
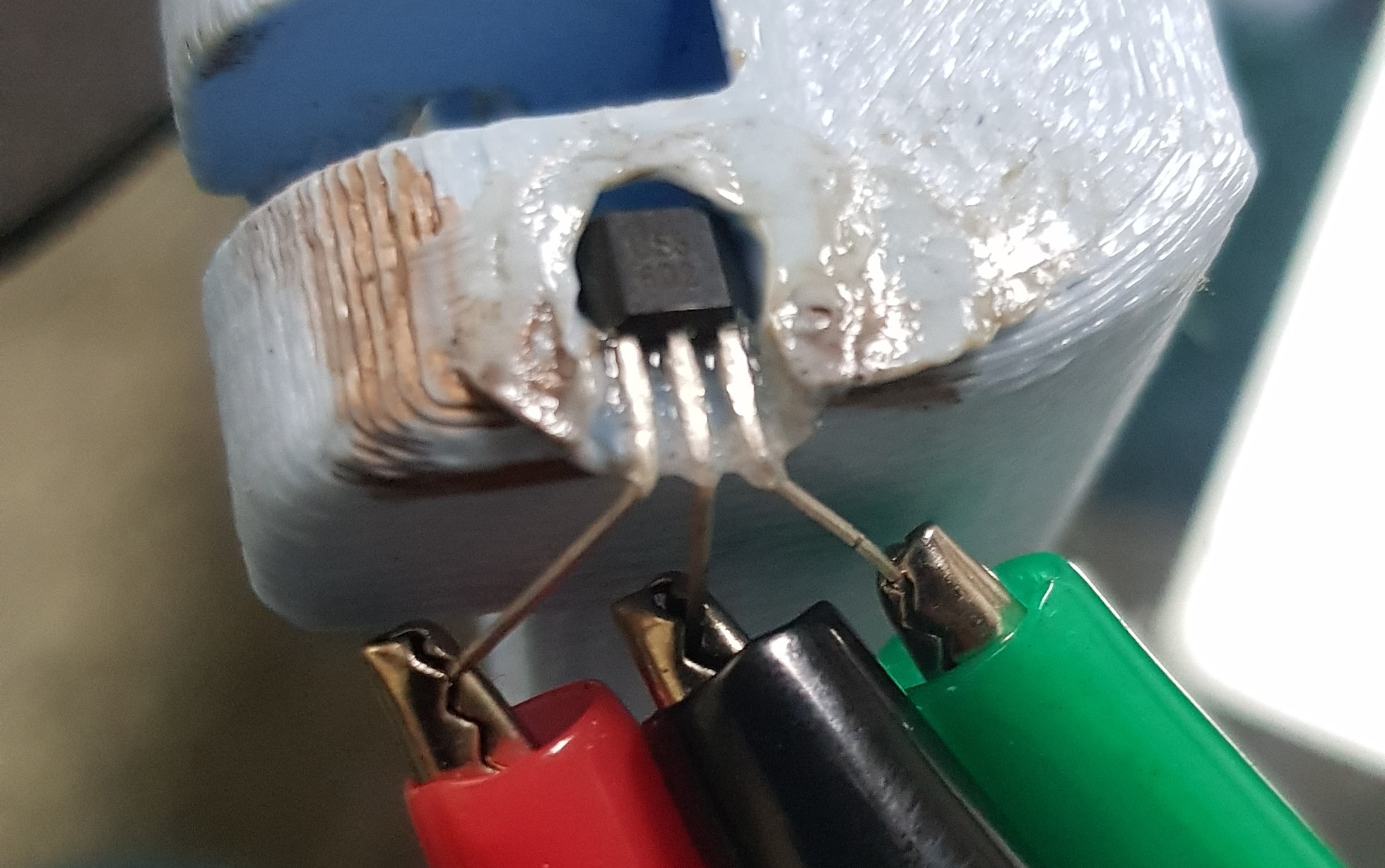
We tried out hall sensors from Adafruit and they work great as a digital ( you need a resistor) or analog sensor. Keep in mind the polarity of your magnet because that matters.
So the lighter, thinner, simpler, less patrs...er linear actuator:
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.