0%
0%
Robotics sensor - 360 scan of environment
A turrent which is an array of 4 lidar sensor's along with two compasses and a servo that scan the environment and dump data into database.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests


 Walter Dunckel
Walter Dunckel
 staticdet5
staticdet5
 Morning.Star
Morning.Star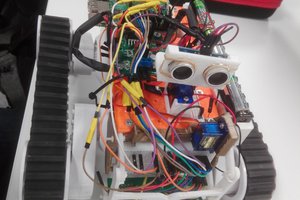
 Alan Chambers
Alan Chambers
The testing shows that the compass's are returning good readings - so the servo does not appear to be interfering. Note that I only issue compass reads when the servo is still.