Resources if you want to learn more about these types of material actuators that I did not create:
http://news.mit.edu/2016/nylon-muscle-fibers-1123
http://writerofminds.blogspot.com/p/nylon-fishing-line-artificial-muscle.html
http://writerofminds.blogspot.com/2014/03/diy-fishing-line-artificial-muscles-iii.html

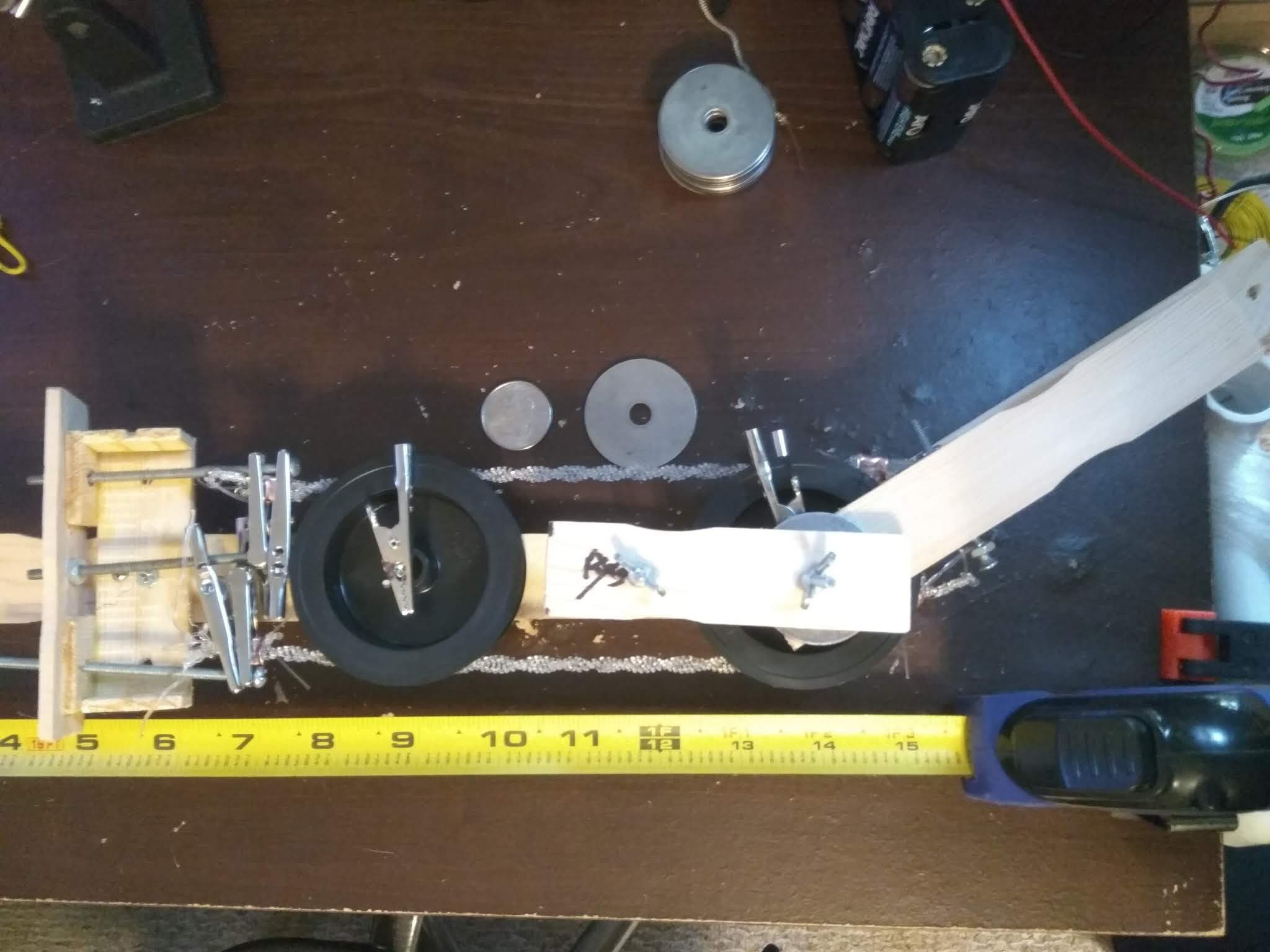

 The rig has several problems including the cheap wood flexing under the strain and causing pinching at the joint. Additionally this rig is a little too big for the size of the muscles, meaning a full contraction does not bring the forearm to where a human arm would rest.
The rig has several problems including the cheap wood flexing under the strain and causing pinching at the joint. Additionally this rig is a little too big for the size of the muscles, meaning a full contraction does not bring the forearm to where a human arm would rest.















 Greg Stephens
Greg Stephens
 Alex Rich
Alex Rich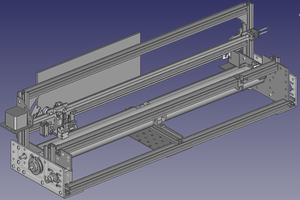
 Kārlis
Kārlis
 Andrew Mayhall
Andrew Mayhall